
計量作業現場における搬送装置について
計量を伴う作業の一環として計量容器の搬送と指定箇所への設置があります。
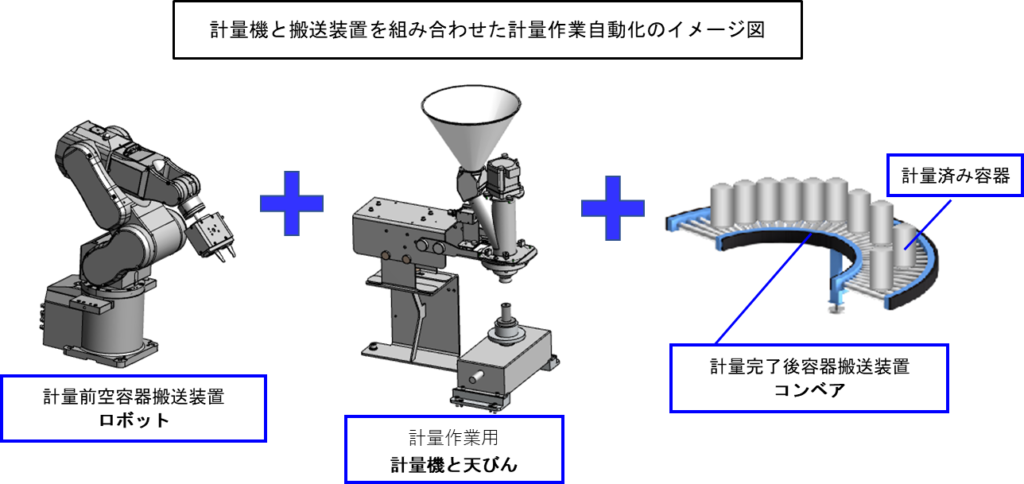
計量機への空容器の設置から、計量済み容器の回収・格納までを全て自動化したい場合などには搬送装置が必要になります。一方で、計量機までの空容器の搬送と設置は搬送装置に任せ、計量済み容器の回収は作業者が行うなど、一部の作業を搬送装置の導入により自動化するといったこともできます。
また、併用する搬送装置は計量に使用する容器のサイズや形状といった特徴や、作業全体の所要時間、作業スペースの大きさといった条件に合わせて選定します。
弊社ではそれぞれの装置の特徴と作業条件、トータルコスト等に合わせた搬送装置のご提案を致します。
搬送装置の種類
装置の動力源となる軸数別に、どんな種類の搬送装置があるのかをご紹介します。
後述の装置へいくほど装置の機構が複雑になり、可能な作業内容も豊富になります。
用語説明
単軸制御=動力源となる軸が一つ
多軸制御=動力源となる軸の数が2つ以上
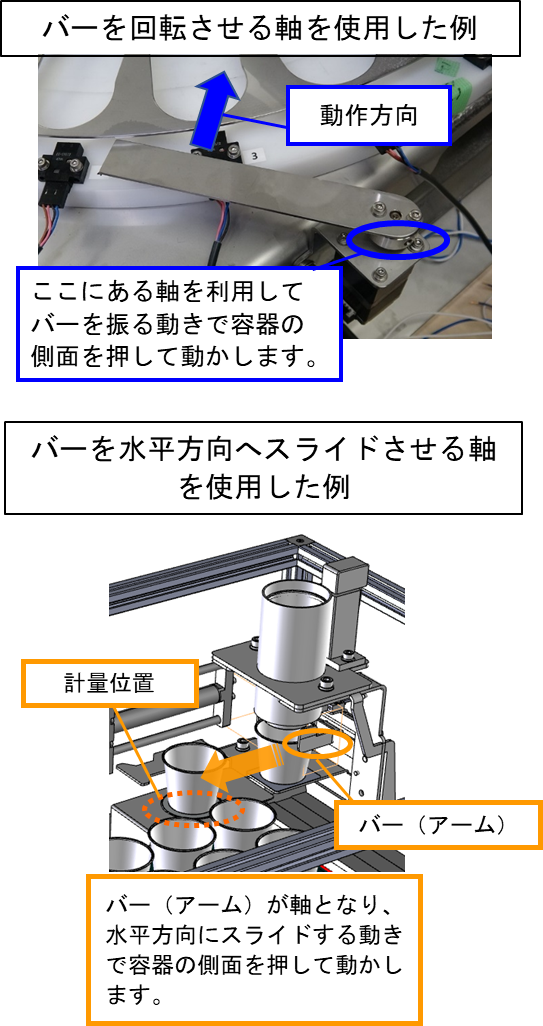
単軸制御~単独使用で容器搬送・設置動作が可能なもの~
バー(アーム)
単軸(軸数=1)制御によって、計量容器を押し出す動作をさせて、計量前と後の搬送作業を行わせるタイプです。バーのような部品を動かして、計量容器を払い出したり、押し出したりして容器を次の工程へと送り出します。
ターンテーブル
ターンテーブル上に空容器や計量中の容器、計量済み容器を設置し、ターンテーブルを回転させることによってそれらを移動させ、次の工程へ送り出します。
作業用途や内容によってターンテーブルの大きさを変えることで、その上に乗せられる容器の数が変更でき、大型のものであれば一度に大量の連続計量も可能です。小型のものは計量機への容器設置と取り出しを迅速に行うのに大変便利です。
小型ターンテーブル使用例
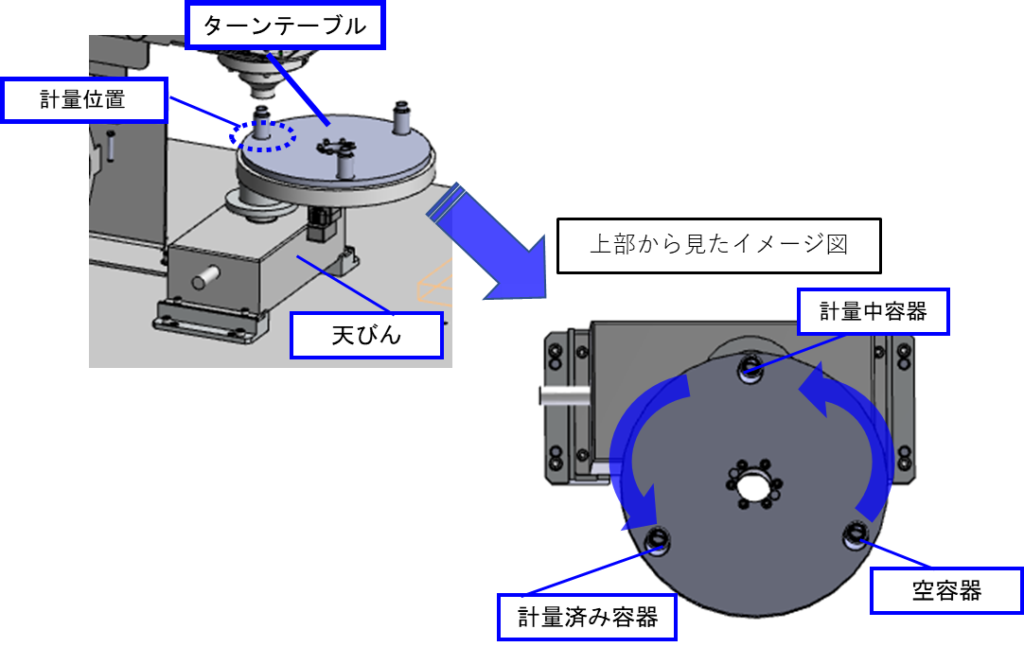
空容器設置箇所、計量位置、計量済み容器設置箇所の3つの位置に、それぞれ一つずつ容器をのせるだけのシンプルなタイプです。
大型ターンテーブル使用例
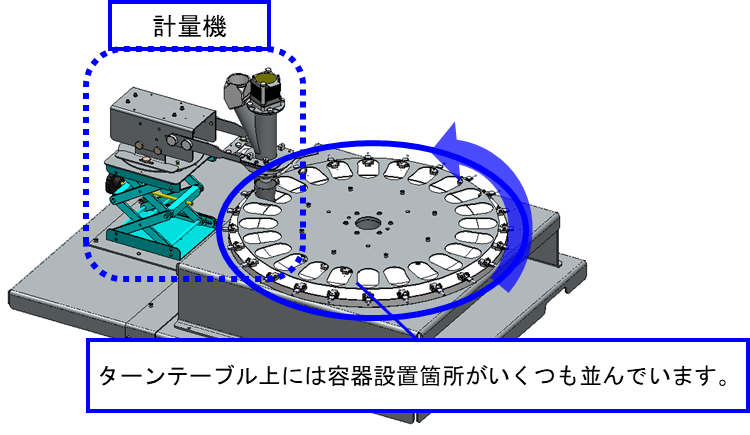
ターンテーブル上に容器を大量に設置するスペースを設ければ、連続計量ができます。適当な数の容器を一度に設置し、計量後もある程度容器を貯めた後に取り出すという作業も可能になります。
単軸制御~単独使用不可なもの(他搬送装置と組み合わせて使用)~
コンベア
コンベアのベルト上に空容器や計量済みの容器をのせて、ベルトを回転することによってそれらを水平方向へ移動させます。ベルトの面積を大きくすることで、一度に移動させる容器の量を増やしたり、搬送中に留めておける時間を長くして次工程までの時間調整を行うことができます。
計量済み容器搬送時の例
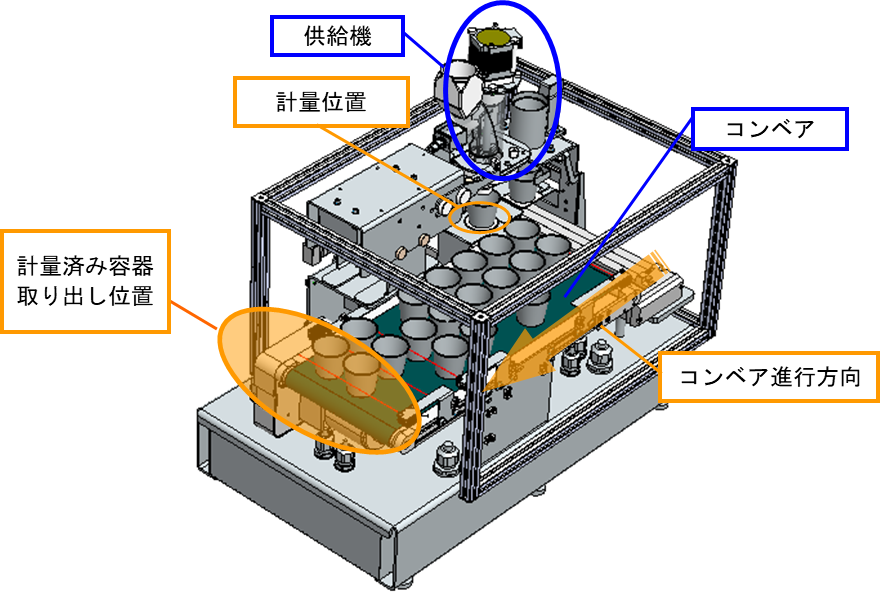
コンベア上にまとまった数の計量済み容器を留めておくとともに、いくつかまとめて容器取り出し位置まで搬送することができます。
多軸制御
多軸制御~直交ロボット~
直線的な軸を組み合わせた構造で、一番シンプルなロボットのタイプです。二軸以上を組み合わせることが多く、移動する動きを縦・横・高さのそれぞれに分けてコントロールし、それぞれを一つずつの軸(X軸・Y軸・Z軸など)に分類して動きを決めます。
複雑な動きはできませんが、迅速かつ高精度な動きが期待できます。一方で、直線的な軸を組み合わせるため、比較的広めの設置スペースを考慮する必要があります。
3軸使用直交ロボット例
動画が見られない場合
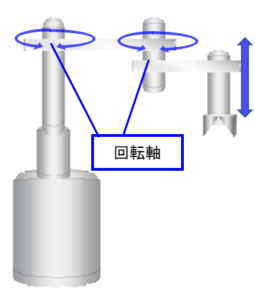
多軸制御~水平多関節ロボット(スカラロボット)~
回転する軸が水平方向に組まれた構造で、軸がくるくると回るような動きをし、指定された位置で先端部分を上下に動かして作業をします。
こちらも高速で移動でき、構造が比較的シンプルなため下記垂直多関節ロボットと比べると低コストかつ小スペースでの設置が可能なロボットです。
一般的には、部品の組み立てや挿入、配置といった作業用に導入されています。
スカラ(SCARA):Selective Compliance Assembly Robot Armの略
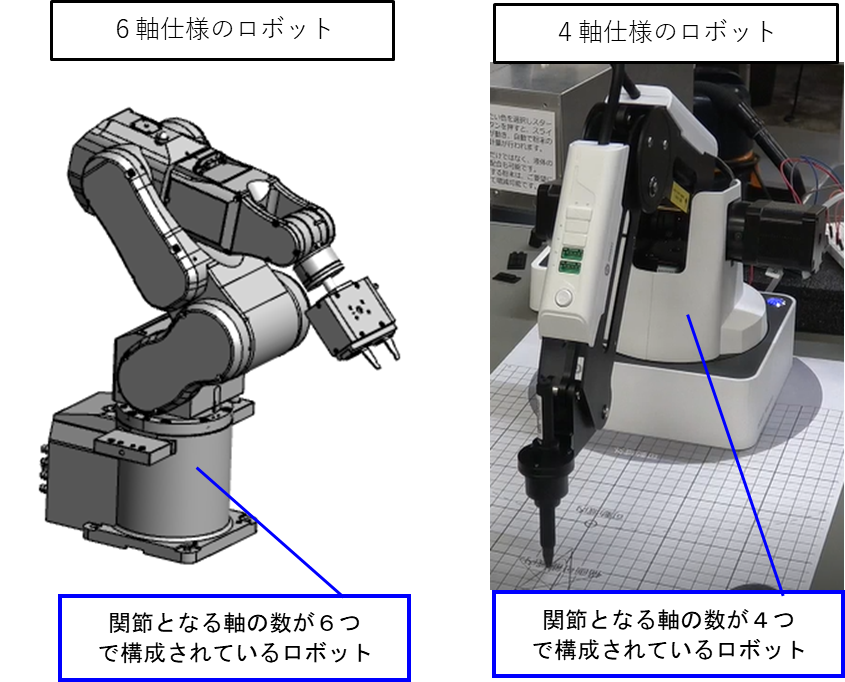
多軸制御~垂直多関節ロボット~
最も人の動きに近い動きができることで人気のロボットの種類です。回転したり、上下に動かしたりできる関節となる軸が複数組み合わさった構成のため、小スペースで複雑な動きができます。
また、ロボットの先端に取り付ける部品(エンドエフェクタ)を様々に変えることで、ロボットが可能とする作業内容も多数に変化します。例えば、二本の爪のような部品を狭めたり、広げたりすることで計量作業現場においては、容器の搬送から設置、格納をはじめ次工程への受け渡しや前工程からの受け取りなど、幅広く活用できます。また、キャッパーと組み合わせれば容器の蓋を取り外し、計量後に再び蓋を取り付けるといった作業を課すことも可能です。