
高精度自動計量配合装置
大量貯槽可能な供給機+多装置との連動可能な構成
製品の概要と動き
パウロ配合連続型-直交2軸仕様は、
計量装置と軸ロボットによる
「計量と配合作業を全自動で行う装置」です。
使用方法は計量重量や条件を入力し、使用する供給機を設置して
運転開始ボタンを押すだけです。
装置は上位装置からの指令と共に、容器を受け取り、
計量を繰り返して配合作業を行います。
作業を終えると、再度上位装置へ容器を受け渡して稼働を終了します。
イメージ画像準備中
◆装置全体が行う作業◆
上位装置から容器を受け取る
+
最大4種類の粉を順に自動計量
+
上位装置へ計量配合済み容器を受け渡す
+
◆人が行う作業◆
配合計量作業内容の設定・供給機と粉末種の紐づけ登録
+
供給機の入れ替え・設置
製品の使用効果
大型作業装置の一部作業(計量と配合)の効率化
アルファの技術で、より高性能な自動化へ
◆上位装置との信号のやりとりなど、制御面でも安心かつ、効率的な設計です。
◆アルファの粉体計測技術で、どんな種類の粉末もご希望通りの計量作業ができます。
大容量の粉末を貯槽して、高精度に計量
アルファフィーダーの650ccタイプを使用することで、約6リットルの粉末を貯槽することができます。
容量が大きくなることで懸念される問題への対策や、舞い上がりの激しい粉への対策なども、アルファ製品なら充実しており、十分ご安心頂けます。
上位装置からの細かい指令に対応可能
アルファ製品なら、上位システムとの細かい信号のやりとりが可能。PLCによる制御システムなので、ソフト面でのカスタマイズも自由自在です。ご使用者が必要な入力・出力内容が設定できます。
製品の特長
容易な特注・カスタマイズ仕様
アルファ製品は全て、PLCによる制御システムを採用しています。
そのため、装置へあらゆる作業指示を容易に与えられます。
PLC以外の制御方法を使用した他社では反映できなかった指示内容も、アルファ製品では可能です。
ご使用者ごとに異なる、細かな入力・出力内容に対応ができます。
装置ご導入後も、PLCによる制御システムであれば、指示内容の変更等が容易にできます。
アルファ製品はハード面だけではなく、ソフト面においてもカスタマイズや特注仕様のご提案を得意としております。
イメージ画像準備中
上位装置との連動における安全対策
連動運転を基本とするため、本製品にトラブルが出た場合の他装置への影響を最小限にするための安全対策が施されています。
その一つとして、制御盤には「安全リレースイッチ」が搭載されています。
安全リレースイッチによる2段階の電源投入システムで、動力システムへの電源と制御システムへの電源を分けて管理しています。
電源投入の際にも、上位装置からの指令内容に応じた規制をかけることが可能です。
イメージ画像準備中
制御作業箇所をコンパクトにする切替盤の使用
通常は供給機(1動力)1つにつき、制御盤1つを使用する装置構成ですが、切替盤による動力の切り替えを行うことで、複数の供給機を使用する場合でも制御盤を1つで構成することが可能になります。
順番に計量し、配合していく装置であれば、供給機が4台以上になる場合には切替盤を使用することをご提案しております。
切替盤の使用により、装置に組み込まれる制御機器部分のスペースが小さくなります。
イメージ画像準備中
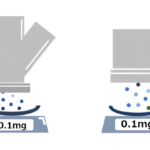
舞い上がりの激しい粉への対策
粉が供給機から容器へ投入される際、激しく舞い上がって計量作業に悪影響を及ぼす粉があります。
本装置では、そのような粉の対策として「ノズル集塵フード」と「天びん昇降システム」を採用しています。
ノズル集塵フードとは、供給機の排出口を囲うように付けられた部品のことで、排出により舞い上がった余分な粉を吸い取ります。
天びん昇降システムとは、供給機の排出口から激しく舞い上がったときの粉末を、なるべく容器内へ納めるため、容器の投入口を供給機の排出口にできるだけ近づけるためのシステムです。
イメージ画像準備中
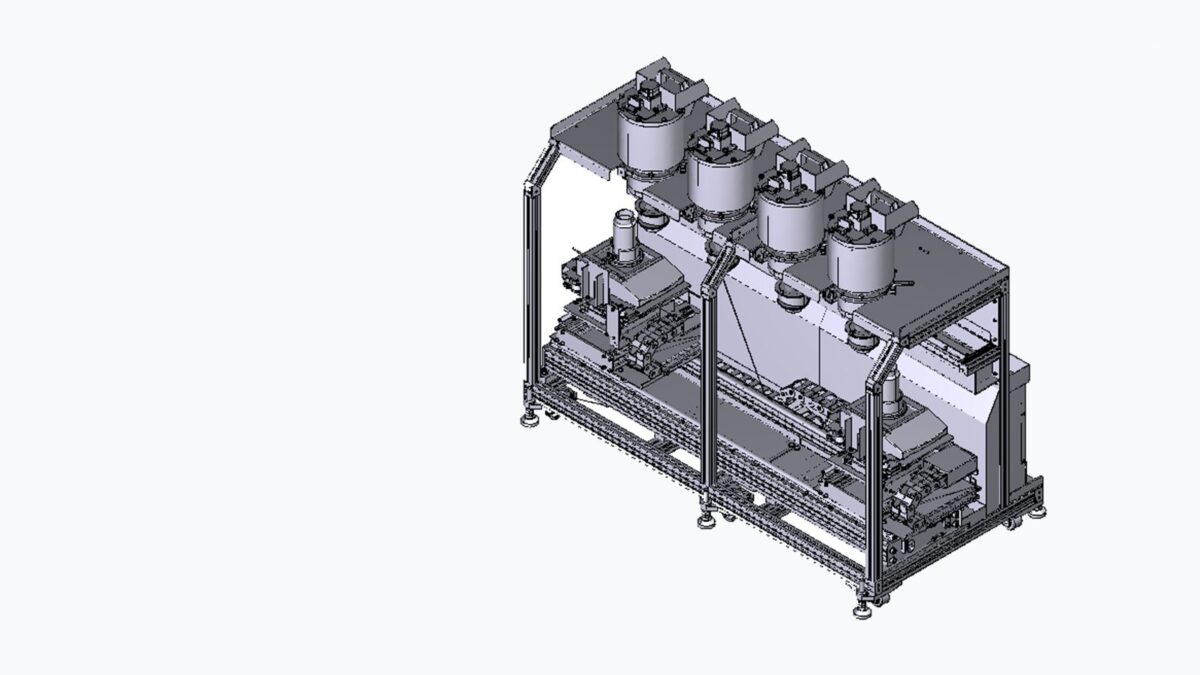
製品構成
装置寸法:W1700mm x D820mm x H1480mm
ーⒶ容器受け取り・受け渡し箇所ー
ーⒷ計量・配合作業箇所ー
本装置は、作業開始前に上位装置から容器を受け取ります。
作業が終了すると、再び上位装置へ計量配合済み容器を受け渡します。
容器をのせた天びんが、容器受け取り・受け渡し箇所から、各計量位置まで移動します。
指定された計量の順番で計量するため、各供給機の下の計量位置まで移動を繰り返します。
全ての計量が終わると、天びんは容器受け取り・受け渡し箇所へ移動します。
天びんの容器受け取り・受け渡し位置から計量位置までの移動は直交1軸ロボットが行います。
ーⒸ天びん・容器搬送箇所ー
ーⒹ制御作業箇所ー
直交1軸ロボットにより、容器をのせた天びんが容器受け取り・受け渡し位置と各計量位置の間を移動します。
主にタッチパネルと制御盤で装置全体に指令を出して動かします。
タッチパネルで動きの設定や作業の記録などをし、パソコンやその他のデバイスにデータを転送できます。
専用ソフトを使用することで、装置とパソコンを常時接続し、最新データの結果によって作業内容を即座に変更することも可能です。
ご使用者はタッチパネルを使用して装置を動かします。
本装置のような大型装置は、メインとなる制御盤以外に、中継ボックスや切替盤を設置しています。
これらの付加機器で制御機構を分散させることで、大型制御盤を1つ設置する場合に比べて省スペースにできます。
製品動作説明
❶
容器の受け取りと搬送
天びんが原点位置で待機します。
連動している上位システムから容器を受け取り、天びん上に乗せます。
❷
容器の計量位置設置
容器をのせた天びんが、1番目に計量する供給機の下(計量位置)まで移動し、容器の投入口を供給機の排出口に合わせて設置します。
❸
計量作業
指定された計量重量と精度で粉を計量します。
必要に応じて集塵機が自動稼働し、舞い上がる粉を吸いながら計量します。
❹
❷と❸の作業の繰り返し
供給機1~4まで直進で計量をしながら容器を搬送します。
全ての計量が終わると、
再び原点位置へ戻ります。
一度の往復で供給機1~4までで必要な粉末を配合することができます。
❺
配合計量が完了した充填容器の搬送
必要な粉末の種類を全て計量し終わり、配合が完了した状態の容器を充填容器受け渡し箇所(原点位置に同じ)まで移動させます。
❻
充填容器受け渡し箇所で停止
充填容器が受け渡し箇所で停止すると、上位システムが容器を取り出し、次の計量に使用する容器を設置して、再度別の配合計量を開始します。
設備・機能紹介
◆大容量かさ上げホッパー付き供給機(ゼロバランサー底面型)
供給機はゼロバランサー底面型を4台搭載。650ccタイプの供給機にかさ上げホッパーを組み合わせることで、1台あたり約6リットルの粉末を貯槽できます。
供給機はドライブユニット着脱式のため、粉末の入れ替え・補充は供給機ごと取り外して行えます。粉に触れる部分の材質はPOM・アクリル・SUSです。
イメージ画像準備中
◆ノズル集塵フードと集塵機
各供給機の排出ノズルには、自動開閉ダンパー(回転式)付きのノズル集塵フードを装備。計量時に舞い上がる余分な粉末をHEPAフィルター搭載の集塵機で吸引し、装置内と計量値への粉の影響を抑えます。
イメージ画像準備中
◆電子天びんとボトルアタッチメント
計量部にはザルトリウス社製電子天びん(最大ひょう量1200g/目量1mg)を採用。500mlボトル専用のボトルアタッチメントで容器を確実に保持し、容器センサが容器の有無を検知します。
天びんに容器がのっていない場合はアラームで自動運転を停止する安全設計です。
イメージ画像準備中
◆天びんごと容器を運ぶ直交2軸ロボット(X軸スライド+Z軸昇降)
容器をのせた天びんはX軸スライドロボット(ストローク1280mm)で各供給機の下へ移動します。
計量時はZ軸昇降ロボット(ストローク70mm)が天びんごと容器を持ち上げ、容器の投入口を排出ノズルに近づけて粉のこぼれ・舞い上がりを抑えます。
イメージ画像準備中
◆シャッターユニットと粉受けユニット
各供給機の下には前後スライド式のシャッターユニットと粉受けユニットを装備。計量前に粉受けが開き、計量後に閉じることで、待機中のノズルからの粉落ちをキャッチし、装置内を清潔に保ちます。
イメージ画像準備中
◆4台の供給機を1つの制御で動かす切替盤
切替ロボット(XZ軸)を内蔵した切替盤が、個々の供給機の動力を切り替えます。供給機ごとに制御盤を持たせる必要がなく、制御機器スペースをコンパクトにできます。
イメージ画像準備中
◆レシピ登録と計量記録(タッチパネル)
7インチカラータッチパネル(アーム付き)で計量重量値・上下限値・落差補正値を設定し、レシピデータとして登録できます。
計量した時間・最終重量値・計量所要時間はCSV形式でUSBメモリに自動記録され、過去の配合記録もパネル上で確認できます。
イメージ画像準備中
仕様一覧
| 項目 | 仕様 |
|---|---|
| 装置名称 | 粉体計量装置 パウロ(容器・天びん移動型) |
| 装置型式 | PS-ZS65-4S-TZ1203-SR/XZ |
| 装置寸法 | W1700 × D820 × H1480mm(突起物を除く) |
| 供給機 | ゼロバランサー底面型 ZS650+かさ上げホッパー6L 4台 |
| ホッパー容量 | 約6L/台 |
| 計量範囲 | 1~40g |
| 計量精度 | ±1% |
| 計量時間 | 目標 約1分20秒/計量(機械性能成行き) |
| 電子天びん | ザルトリウス社製(最大ひょう量1200g/目量1mg) |
| 対象容器 | 500mlボトル(専用ボトルアタッチメント使用) |
| 容器搬送 | X軸スライドロボット(ストローク1280mm) |
| 天びん昇降 | Z軸昇降ロボット(ストローク70mm) |
| 動力切替 | 切替盤(XZ軸切替ロボット・4台分) |
| 制御装置 | PLC:三菱電機 FX5UCシリーズ |
| 操作部 | 7インチカラータッチパネル(アーム付き) |
| 集塵機 | チコーエアーテック製・HEPAフィルター |
| 粉塵対策 | ノズル集塵フード(自動開閉ダンパー付き)・シャッター/粉受けユニット |
| 計量記録 | CSV形式でUSBメモリに保存(時間・最終重量値・所要時間) |
| 上位連動 | 上位通信アドレスマップによる指示・結果書き込みに対応 |
| 電源 | AC100V 15A |