
装置構成説明
装置全体イメージ
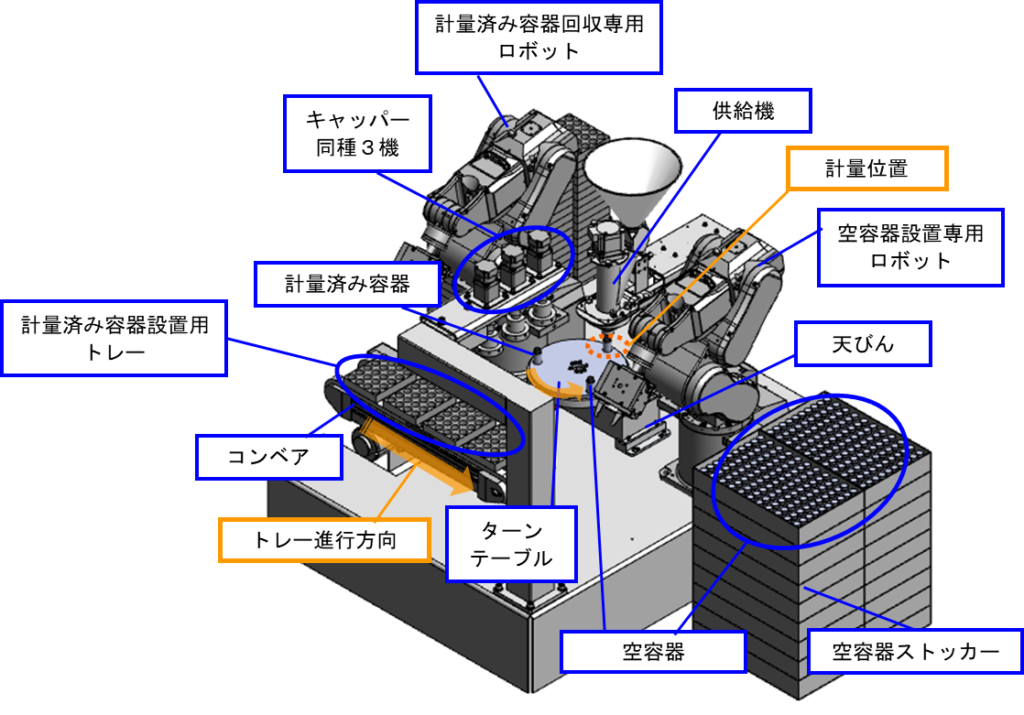
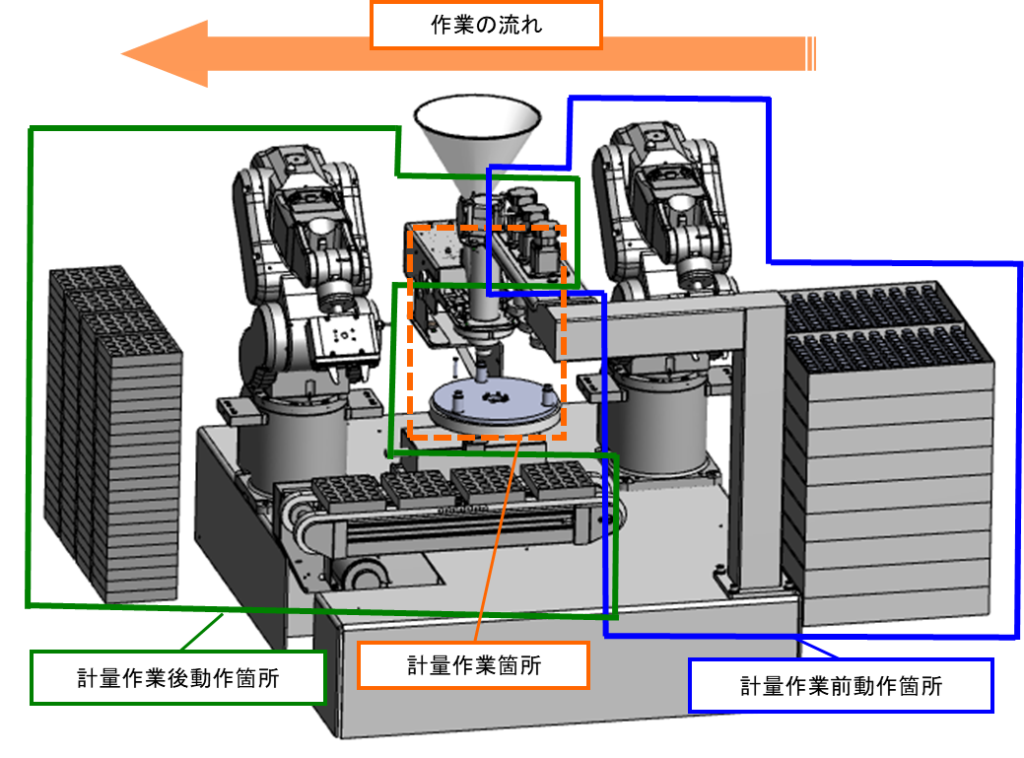
作業内容ごとの構成部品と設置箇所
この装置は大きく分けて3つの作業を行います。
作業内容と順序は以下の通りです。
①正面右側での空容器設置
②中央部分での計量作業
③正面左側での計量済み容器回収作業
装置動作説明
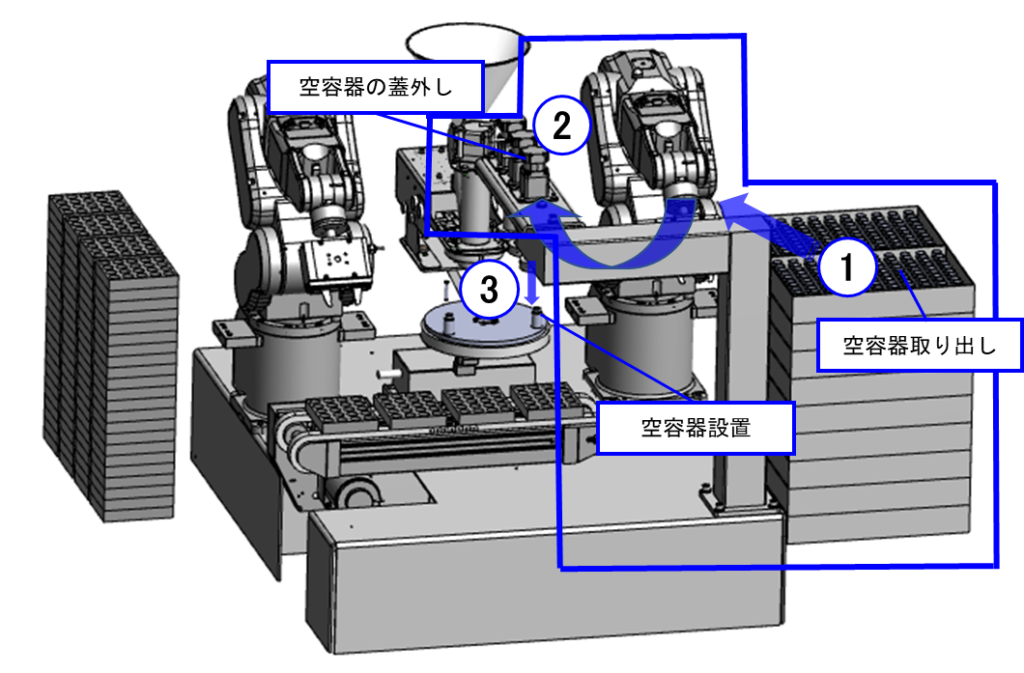
1.計量作業前動作箇所
ここでは以下の3つの作業を行います。
①空容器取り出し
空容器設置専用ロボットが、蓋つきの状態の
計量空容器をストッカーから一つ取り出します。
②空容器の蓋外し
ストッカーから取り出された空容器がキャッパーの
真下まで搬送され、キャッパーによってその蓋だけ
が取り外されます。
③空容器設置
蓋が外された状態の空容器がターンテーブル上の
指定箇所に設置されます。
キャッパーの仕組み
この装置には全く同じタイプの3つのキャッパーが供給機の前方に設置されています。これらが交互に開けた蓋を保持し、再び放つという動作を繰り返すことにより、スムーズな空容器の設置と計量済み容器の設置を促しています。
キャッパーは蓋つき空容器が近づけられると、蓋が開く方向に回転し、その内部に蓋を挿入すると数秒もかかることなく蓋を開けることができます。同様に、キャッパーが蓋を保持した状態で蓋のない容器が近づけられると、今度は蓋を閉める方向に回転し、容器の頭がその内部に挿入されると蓋を閉めた状態で容器を取り出すことができます。
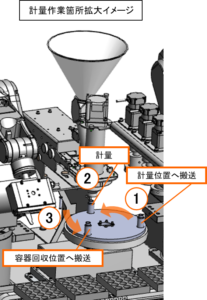
2.計量作業箇所
装置の中央部では計量作業が行われます。
ターンテーブル上には計量前の空状態、計量最中、計量済み状態の3種類の容器が置かれており、ターンテーブルが反時計回りに回転することにより、順次入れ替わり設置が自動的に行われます。
◆計量作業箇所作業手順◆
空容器設置専用ロボットによってターンテーブル上
に置かれた空容器を、テーブルを回転させることに
よって、天びん上の計量位置まで搬送します。
②計量
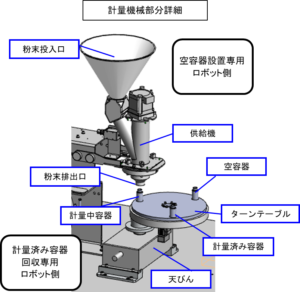
設定された計量内容に従って供給機から空容器へ
粉末が投入されます。
※供給機には様々なタイプがあり、計量に使用する
粉末の性状によって選定されます。
③容器回収位置へ搬送
計量が完了した容器はターンテーブルの回転に
よって、容器回収位置へ搬送されます。
3.計量作業後動作箇所
粉末が充填された容器は計量済み容器回収専用ロボットによって回収され、トレーに設置されます。
トレー上に指定の個数の容器が置かれると、コンベアの回転によって装置中央側のコンベア末端まで搬送されます。
作業者はこの時点でトレーを回収し、作業のワンサイクルが終了となります。
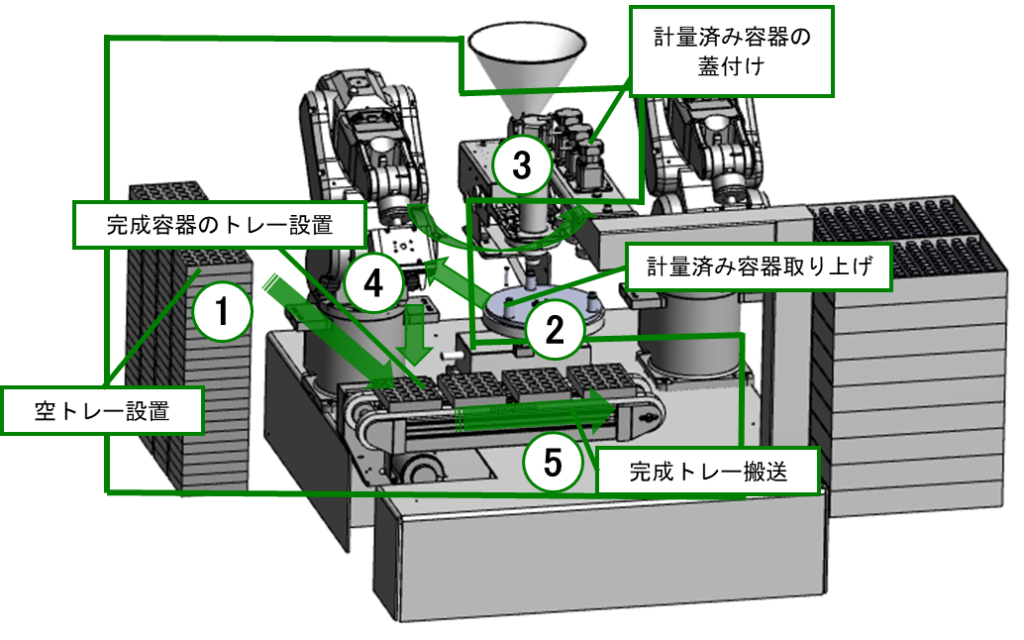
◆計量作業後動作箇所作業手順◆
①空トレー設置
計量済み容器回収専用ロボットが容器を収納する
ためのトレーを持ってきて、コンベア上に設置
します。
②計量済み容器取り上げ
ターンテーブルの回転によって、回収位置まで搬送
されてきた容器を取り上げます。
③計量済み容器の蓋付け
粉末が充填された計量済み容器をキャッパーの真下
に近づけると、キャッパーが蓋を閉める方向へ回転
し、粉末投入口が回転しているキャップに挿入され
ると蓋が閉まります。
④完成容器のトレー設置
蓋付きの計量済み容器がトレー上に一つ一つ設置
されます。一つのトレーの最大許容個数まで完成
容器が次々に設置されていきます。
⑤完成トレー搬送
④で完成容器が満タンになったトレーはコンベアに
よって、その末端(装置中央側)まで順次搬送
されます。
この位置で作業者にトレーが取り出されると、
作業ワンサイクルが終了となります。
多軸(6軸)ロボット説明
ロボット構成と動き
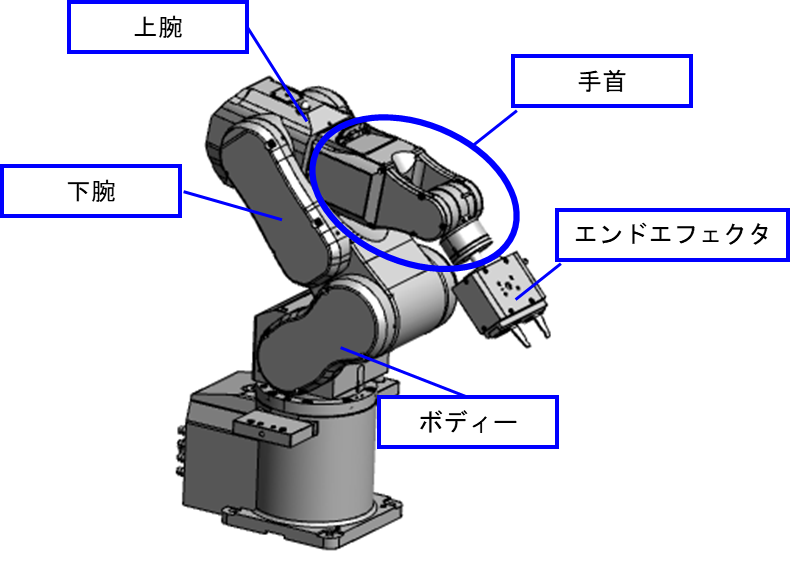
構成部位名称と位置
6軸ロボットは6つの軸(関節のような役割をするもの)によって、主に4つの部位を動かし、それぞれの部位での動かし方を変えることによって様々な動きができでます。
主な部位は以下の4つです。
右図でその位置が確認できます。
①ボディー
②腕(上腕+下腕)
③手首
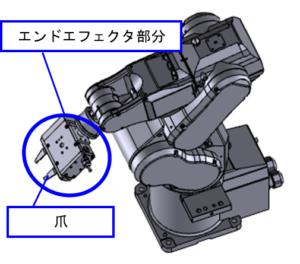
④エンドエフェクタ
(手首から先の部分。ロボットの作業内容に
合わせて、様々な種類の部品に変えて使用する
部分。)
エンドエフェクタの種類
作業内容に合わせたエンドエフェクタの種類には以下のようなものがあります。
| 動き | エンドエフェクタ種類(形状) |
| 持ち上げる | 吸盤(パット)、爪(グリッパー)、二本のバー |
| つまむ | 爪(グリッパー) |
| つかむ | 吸盤(パット)、爪(グリッパー) |
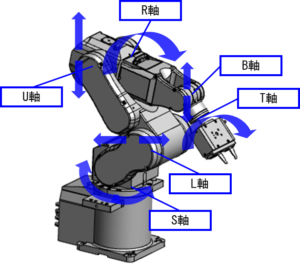
各軸名称と位置
6軸ロボットの6つの軸名称とその軸の制御によって行える内容は、ロボットの下部から順に示すと以下の通りです。
①S軸(Swing[旋回]の意より)
ボディーを回転させる
②L軸(Lower arm[下腕]の意より)
下腕から先端までを前後に動かす
③U軸(Upper arm[上腕]の意より)
上腕から先端までを上下に動かす
④R軸(wrist Rotation[手首旋回]の意より)
手首を回転させる
⑤B軸(wrist Bending[手首曲げ]の意より)
手首を上下に動かす
⑥T軸(wrist Turning[手首回転]の意より)
エンドエフェクタを回転させる
動作例①爪(グリッパー)を使用した持ち上げ→搬送→置き動作
エンドエフェクタに2本の爪の開閉によって物をつかみ、離すという動作ができるグリッパーを装着したときのロボット動作の具体例として右の動画をご参照下さい。
主な動きは以下の通りです。
①移動させたい物(ワーク=ここでは白い部品)
までエンドエフェクタ部分を移動させる。
②グリッパーを開いて、ワークの幅に爪を合わせる。
③グリッパーを閉じてワークをつかむ。
④ワークを移動させたい位置まで搬送し、
グリッパーを開いてワークを下ろす。
⑤グリッパーを閉じる。
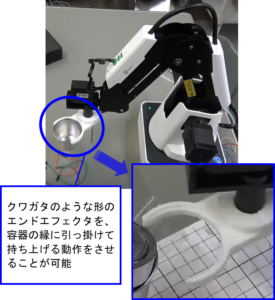
動作例②引掛け爪を使用した持ち上げ→搬送→置き動作
エンドエフェクタ部分にクワガタのような形をした引掛け爪の部品を装着し、容器を持ち上げて搬送し、別の場所に移動させるというロボット動作の具体例として右の動画をご参照下さい。
主な動きは以下の通りです。
①容器位置までエンドエフェクタ部分を移動させる。
②容器の縁に引掛け爪がかけられるように手首部分
を下げて、位置を合わせる。
③容器を持ち上げる。
④容器を移動させたい位置まで搬送し、
手首部分を下げて容器を下ろす。
⑤待機位置へ戻る。