パウロー容器・供給機入れ替え型ー
ロボットと作業装置による複雑作業の全自動化
製品概要
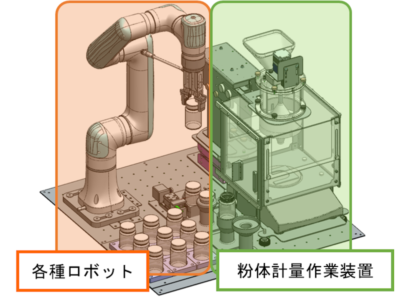
各種ロボット+各種専門作業形態
右図のようなロボット(左側)と、粉末計量装置(右側)など、各種作業をする装置の組み合わせで成り立つ装置が「パウロー容器・供給機入れ替え型ー」という製品です。
このタイプは、作業の対象物である容器やバイアルなどが天びん上へ搬送されていきます。作業を加える機器である供給機や分注機も、その内容物の種類ごとに用意されており、必要に応じて入れ替え処理が行われます。
協働ロボットとアルファ製計量/供給装置を組み合わせれば、粉末の計量や配合、供給作業をメインとし、一連の作業に必要な空容器の設置、充填容器の取り出しなどの動作も行うことが可能な装置になります。
液体・粘体・固体を扱う作業や、pH・光度測定作業、各種検査・保存作業などといった作業にも応用が可能な装置です。
装置内の計量作業においては、従来より使用されている実績豊富なアルファ専オリジナル装置である「ゼロバランサーY管型/底面型」や、最新の小型供給機をもつ「ゼロバランサーコンパクト」を使用。
計量作業前後における空容器や充填容器を使用した作業には、協働ロボットを使用します。
単純でスピーディーな動作よりも、高度でミス(エラー)のない動作を得意とするため、製品量産よりも
研究・分析・試作・試験といった分野での活用に最適な製品の一つです。
▼パウロー容器・供給機入れ替え型ー製品の一例
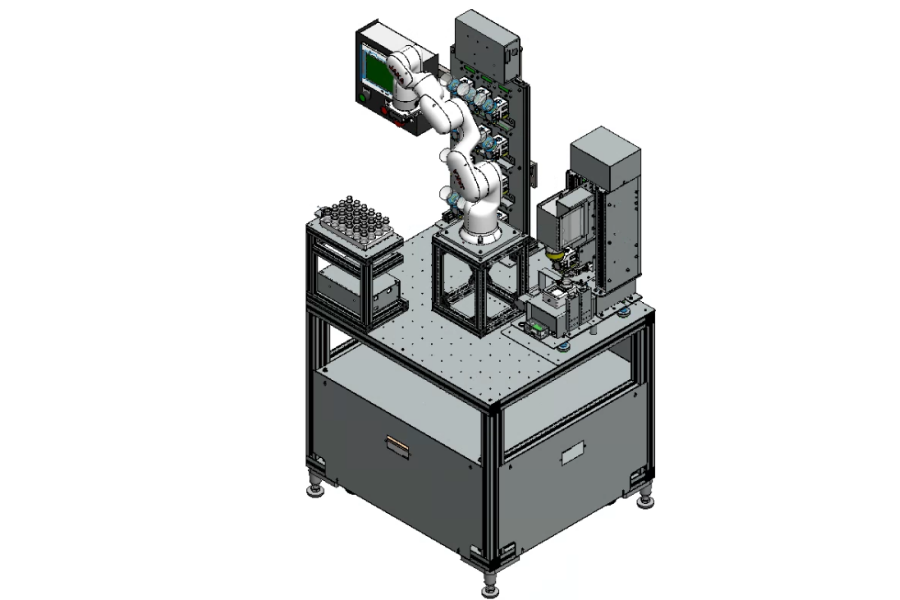
ロボットと作業装置を組み合わせた
「複数種・複雑作業向け」装置
◆各種ロボットの作業◆
●各種作業装置付近での準備・補助作業
●各種作業装置間でのワークの移動・搬送作業 など
◆各種専門作業装置の作業◆
●粉体・固体・粘体・液体を扱う作業
●pH・光度測定作業
●各種検査・保存作業 など
「完全無人化」、「24時間稼働」体制が可能に
粉体計量作業向けパウロー容器・供給機入れ替え型ーの場合
◆粉体計量作業装置の作業◆
「単一パターン」の単一、又は連続計量作業、
「複数パターン」の単一、又は連続計量作業、
「単一パターン」の単一、又は連続配合計量作業、
「複数パターン」の単一、又は連続配合計量作業
※上記いずれかの作業
◆ロボットの作業◆
必要物品の準備
●天びん上までの空容器移送
●空容器の設置
●天びん上からの充填容器移動
●充填容器回収位置への設置
●風防の開閉
●蓋の開け閉め
●ラベルの添付
●供給機の搬送・設置 など


特長
複雑多様な作業を1台で担える
多軸制御とハンド等のエフェクタの付け替えにより、協働ロボットの動きに多様性が増しました。
従来の単調・単一な作業のみではなく、高度な作業が可能になったことで、複数の作業を1台で処理できるため、極力無人状態での作業進行が可能です。
最小スペースで最大の機能を発揮する
可搬重量の幅にも広がりがあり、小型で小回りのきくものから、大型でも安全柵等なしで稼働させることができる協働ロボットを使用すれば、装置の設置スペースも最小限になります。
無人状態の確保、作業時間帯を選ばない
協働ロボットのような複雑な作業が行える機構を取り入れることにより、無人化・省人化が可能なため、夜間でも装置を稼働状態にさせることができます。
アルファの計量/供給装置を組み合わせたパウロでは、現状の作業所要時間も大幅に削減されます。
人がやるしかできない作業がなくなる
完成品までの最短時間が更新される
稼働の様子
作業性能
| 使用可能なロボット機構 | ●直交ロボット |
| ●水平多関節ロボット (スカラロボット) |
|
| ●垂直多関節ロボット(協働ロボットを含む) | |
| ●バー、アーム | |
| ●ターンテーブル | |
| ●コンベア | |
| 作業対象物 | 容器、薬包紙、袋、蓋等、作業内容による |
| 許容可搬重量 | ロボット種による (各ロボットの詳細ページをご参照下さい) |
| 稼働可能範囲 | ロボット種による (各ロボットの詳細ページをご参照下さい) |
| 関節最高スピード | ロボット種による (各ロボットの詳細ページをご参照下さい) |
| 使用可能な搬送機構 | コロコン(ローラーコンベア) |
※上記表内の各項目は、それぞれ右側の箇条書き内容より選択して頂くことになります。
| 使用するロボット | 協働ロボット(主に以下の3種。その他の種類は要ご相談) |
| ●JAKA MiniCobo | |
| ●JAKA Mini2 | |
| 作業対象物 | ●容器 ●薬包紙 ●袋 ●蓋 ●取っ手 ●トレー |
| ※上記以外も取り扱い可 | |
| 許容可搬重量 | ロボット種による (下記仕様欄をご参照下さい) |
| 稼働可能範囲 | ロボット種による (下記仕様欄をご参照下さい) |
| 関節最高スピード | ロボット種による (下記仕様欄をご参照下さい) |
※上記表内の各項目は、それぞれ右側の箇条書き内容より選択して頂くことになります。
| 使用供給機 | ●アルファフィーダー底面型ゼロバランサー用 |
| ●アルファフィーダーY管型ゼロバランサー用 | |
| ●アルファフィーダーゼロバランサーコンパクト用 | |
| ●アルファフィーダー底面型ダストディパーチャー用 | |
| ● アルファフィーダーY管型ダストディパーチャー用 | |
| 計量/供給可能重量 | 使用する供給機に準ずる ※詳細は各供給機の仕様をご覧下さい。 |
| 計量/供給可能精度 | 使用する供給機に準ずる ※詳細は各供給機の仕様をご覧下さい。 |
| ホッパー(貯槽)容量 | 使用する供給機に準ずる ※詳細は各供給機の仕様をご覧下さい。 |
| 計量/供給可能粉末 | 例)石松子、アエロジル、カーボン、シリカ、小麦粉、タンカル その他はこちらをご参照下さい。 |
構成要素(仕様)
| パウロ種類 | 容器・供給機入れ替え型 |
| 計量/供給装置(右より選択) | ●ゼロバランサー |
| ●ゼロバランサーコンパクト | |
| ●ダストディパーチャー | |
| ●ミリゼロ | |
| ●ミリフィーダー | |
| 天びん | 各社各種(※装置全体構成より使用可否判断あり) |
| タッチパネル(右より選択) | ●ウィンテック株式会社製 |
| ●シュナイダーエレクトリックホールディングス株式会社製 | |
| 大きさ、機能等の違いはこちら | |
| ※アルファ製計量/供給装置を複数設置の場合、1台につきタッチパネルも1台設置。 | |
| 制御盤 | ●自立型 |
|
●組み込み型 |
|
|
※大きさ、カラー等ご相談に応じて専用仕様に変更可能 |
| 供給機用追加可能(オプション)部品 | ●投入シュート |
| ●増設ホッパー ※ゼロバランサー/ダストディパーチャー底面型使用時のみ |
|
| ●投入口アタッチメント | |
| ●ブリッジブレーカー増設ホッパー内用 ※ゼロバランサー/ダストディパーチャー底面型使用時のみ |
|
| ●ブリッジブレーカースクレッパー装着用 | |
| ●粉末抑制用かさ | |
| ●排出ノズル | |
| ●振動機(貯槽部用、排出部用、容器用) | |
| ●除電器(ホッパー付近用、排出口付近用) | |
| ●RFIDタグ+リーダー(供給機種判別用) | |
|
●粉受け |
|
|
●レーザーセンサ(ホッパー内粉面検査用) |
|
| 装置全体用追加可能(オプション)部品 | ●集塵機(ホッパー投入口付近用、排出口付近用、風防内全体用) |
| ●除電器(天びん装着用) | |
| ●RFIDタグ+リーダー(容器判別用) | |
| ●LEDライト | |
| ●シグナルタワー | |
|
●レーザーセンサ(容器等有無感知用、容器等大きさ検査用など) |
|
| 搬送・移送装置(機構)/補助作業装置(機構) |
●直交ロボット(株式会社IAI製) |
|
●水平多関節ロボット(株式会社IAI製) |
|
|
●垂直多関節ロボット(JAKA社製) |
|
|
●バー、アーム |
|
|
●ターンテーブル |
|
|
●コンベア |
|
|
●コロコン(ローラーコンベア) |
※上記表内の各項目は、それぞれ右側の箇条書き部分より選択して頂くことになります。
※オプション部品や、追加で使用可能な付加機器・装置等は、作業内容や選択されたパウロの機構により異なりますのでご注意下さい。
現在は以下の2種類の協働ロボットから選択して、装置に使用することができます。
この他の種類を使用する場合は、プログラミングの製作が必要になりますので、要ご相談となります。
| 種類(名称) | 軸数 | 本体質量(kg) | 可搬重量(kg) | 動作範囲(mm) | 繰り返し位置決め精度(mm) | 関節最高スピード | 可能動作 |
| JAKA MiniCobo | 6 | 9.4 | 1 | 580 | ±0.1 |
120~180°/s -* |
容器・蓋・供給機入れ替え |
| JAKA Mini2 | 6 | 9.9 | 2 | 580 | ±0.1 |
120~180°/s -* |
容器・蓋・供給機入れ替え |
*各関節により異なる