パウロー容器入れ替え型ー
ロボットと作業装置による連続動作作業
製品概要
各種ロボット+各種作業形態
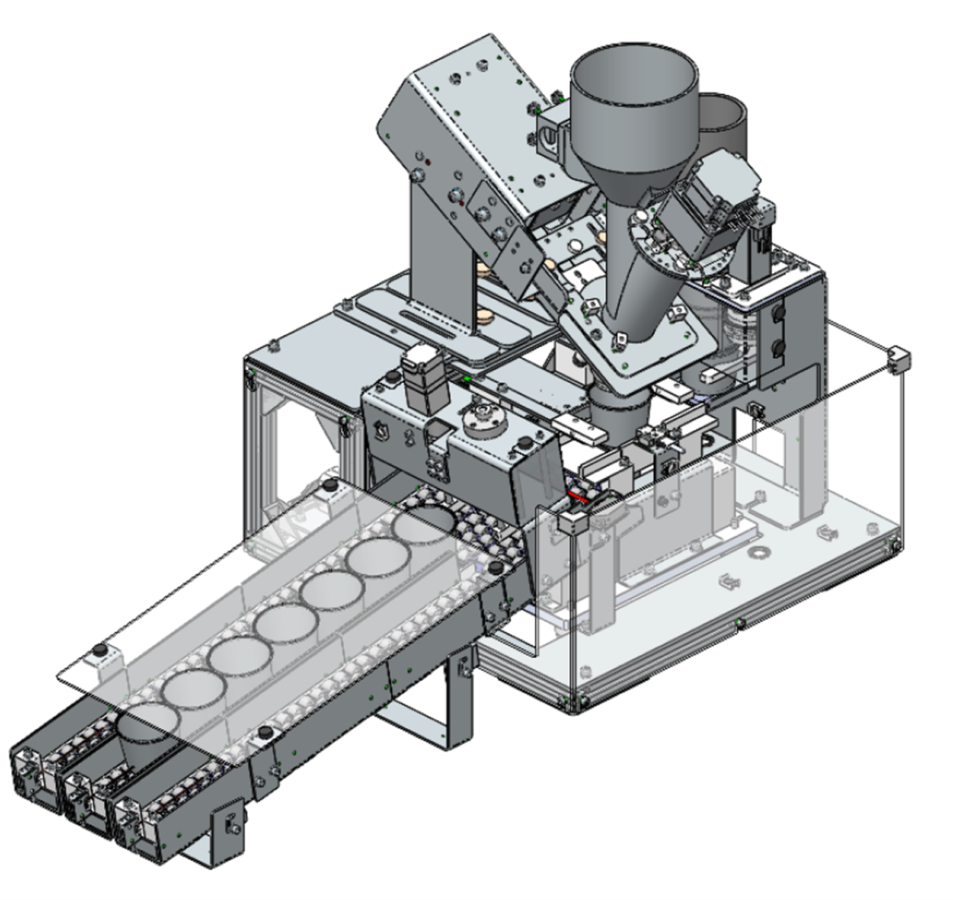

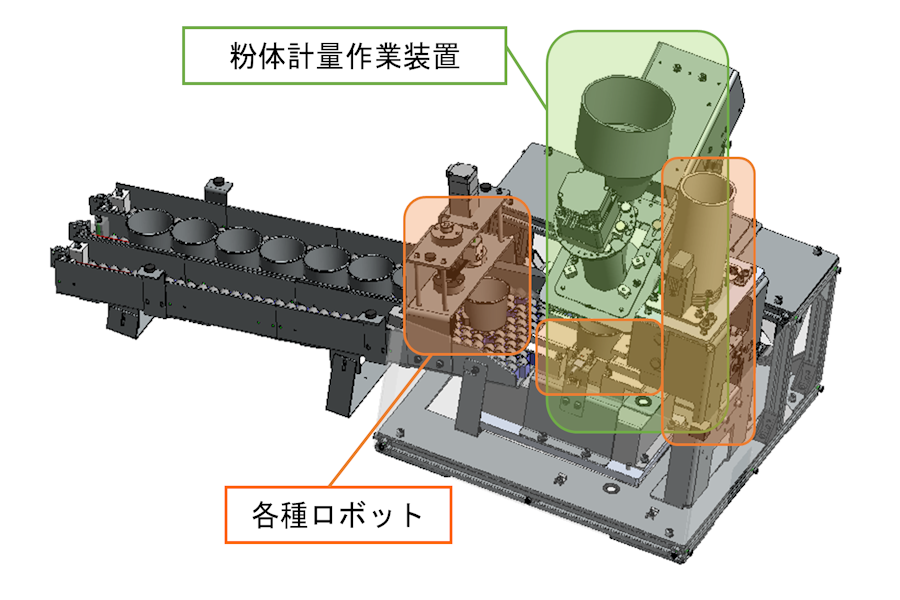
▲パウロー容器入れ替え型ー製品の一例
上図のようなロボット機構と、粉末計量装置など、各種作業をする装置の組み合わせで成り立つ装置が「パウロー容器入れ替え型ー」という製品です。
各種ロボット機構とアルファ製計量/供給装置を組み合わせれば、粉末の計量、供給作業をメインとし、一連の作業に必要な空容器の設置、充填容器の蓄積動作も行うことが可能な装置になります。
液体・粘体・固体を扱う作業や、pH・光度測定作業、各種検査・保存作業などといった作業にも応用が可能な装置です。
装置内の計量作業においては、従来より使用されている実績豊富なアルファ独自製品装置の一つである「ゼロバランサーY管型/底面型」や、最新の小型供給機をもつ「ゼロバランサーコンパクト」を使用。
計量作業前後における空容器や充填容器に施す作業には、各種ロボット(直交・水平多関節・多軸多関節ロボットなど)を使用します。
単純でスピーディーな動作をより得意とするため、
製品量産の分野での活用に最適な製品の一つです。
ロボットと作業装置を組み合わせた
「連続単純作業向け」装置
◆各種ロボットの作業◆
●各種作業装置付近での準備・補助作業
●各種作業装置間でのワークの移動・搬送作業 など
◆各種作業装置の作業◆
●粉体・固体・粘体・液体を扱う作業
●pH・光度測定作業
●各種検査・保存作業 など
「省人化」、「最短時間でミスのない作業」が可能に
粉体計量/供給作業向けパウロー容器入れ替え型ーの場合
◆粉体計量/供給作業装置の作業◆
「単一パターン」の自動計量作業、
又は
「単一パターン」の自動供給作業
◆各種ロボットの作業◆
必要物品の準備
●天びん上までの空容器移送
●空容器の設置
●天びん上からの充填容器移動
●充填容器回収位置への設置 など
特長
速くて無駄がない
1つの対象物(容器やワーク等)に対する作業が完了するごとに、次の対象物へと次々に作業を連続して行えます。
単純作業の繰り返しスピードが速いため、完成品までの作業所要時間を大幅に短くすることができます。
さらに、蓄積可能な箇所を設けることで、人が一定時間装置から離れて、別作業をすることも可能です。
作業スペースの維持
使用するロボットの種類や、搬送機構の設計を工夫することにより、コンパクトな装置がご提案できます。
限られた現状の作業スペースで、作業を自動で行う装置の設置が可能です。
作業結果が一目瞭然
ロボットや搬送機構、オプション機能等の設置により、作業結果による完成品の仕分けや判断が容易に行えます。
計量や供給作業であれば、計量合格品と不合格品の判断を装置が行うため、完成品の取り間違いなどのヒューマンエラーも防げます。
完成品までの最短時間が更新
不良品・ヒューマンエラーの削減
稼働の様子
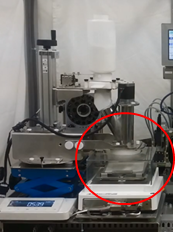
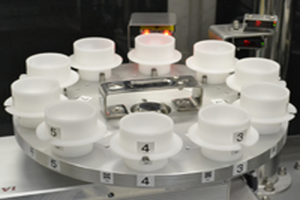
こちらの装置では、移送の役割を「ターンテーブル」が行っています。
ターンテーブルは、空・充填容器の蓄積の役割も担うことができ、装置設置のスペースをより小さくすることができます。
計量装置には「ゼロバランサー底面型」が使用されています。
※動画中の説明で使用している「連続型」とは、「容器移動型」の旧呼称です。
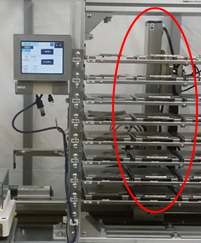
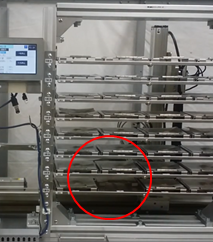
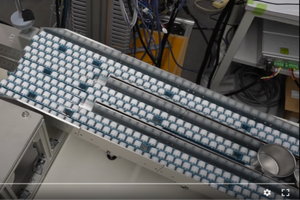
こちらの装置では、移送・搬送の役割を「直交ロボット」が行っています。
計量の対象物は薬包紙で、それを乗せたトレーを格納棚に設置して管理しています。
計量装置には「ゼロバランサーY管型」が使用されています。
操作方法と稼働の流れ一例
上記「直交ロボット+計量装置」の操作方法をパウロー容器入れ替え型ー製品の操作と稼働の流れの一例としてご紹介します。
❶~❸を作業者が行うと、装置が❹~❻の動作を繰り返します。
ここでは、全ての容器トレーに対する作業が終了が装置稼働終了のタイミングになります。
❶粉末投入

供給機上部にあるホッパー(貯槽部)の粉末投入口に、粉末を入れます。
❷薬包紙と容器トレーの設置

薬包紙を乗せた容器トレーを設置します。
❸稼働開始ボタンの押下
タッチパネル画面上にあるスタートボタンを押すと、装置が稼働を開始します。
❹容器トレー自動搬送開始
ロボットが容器トレーを取り、天びん上まで移送します。
❺計量動作
容器トレーが天びんに置かれると、自動で計量作業を開始します。
❻容器トレーの交換
計量が完了した容器トレーを元の場所に戻し、新しい容器トレーを取り、天びん上まで移送します。


対象物となる容器やワークなどを天びん上へ移送したり、ストックスペースから別の場所へ搬送したりする方法には、
以下のようなものがあります。

直行ロボット
ターンテーブル
コロコン(ローラーコンベア)
作業性能
| 使用可能なロボット | ●直交ロボット |
| ●水平多関節ロボット (スカラロボット) |
|
| ●垂直多関節ロボット(協働ロボットを含む) | |
| ●バー、アーム | |
| ●ターンテーブル | |
| ●コンベア | |
| 作業対象物 | ●容器 ●薬包紙 ●袋 ●蓋 ●取っ手 ●トレー |
| ※上記以外も取り扱い可 | |
| 許容可搬重量 | ロボット種による (各ロボットの詳細ページをご参照下さい) |
| 稼働可能範囲 | ロボット種による (各ロボットの詳細ページをご参照下さい) |
| 関節最高スピード | ロボット種による (各ロボットの詳細ページをご参照下さい) |
| 使用可能な搬送機構 | コロコン(ローラーコンベア) |
※上記表内の各項目は、それぞれ右側の箇条書き内容より選択して頂くことになります。
| 使用供給機 | ●アルファフィーダー底面型ゼロバランサー用 |
| ●アルファフィーダーY管型ゼロバランサー用 | |
| ●アルファフィーダーゼロバランサーコンパクト用 | |
| ●ミリゼロ用供給機 | |
| ● ミリフィーダー用供給機 | |
| 計量/供給可能重量 | 使用する供給機に準ずる ※詳細は各供給機の仕様をご覧下さい。 |
| 計量/供給可能精度 | 使用する供給機に準ずる ※詳細は各供給機の仕様をご覧下さい。 |
| ホッパー(貯槽)容量 | 使用する供給機に準ずる ※詳細は各供給機の仕様をご覧下さい。 |
| 計量/供給可能粉末 | 例)石松子、アエロジル、カーボン、シリカ、小麦粉、タンカル その他はこちらをご参照下さい。 |
※上記表内の項目は、それぞれ右側の箇条書き内容より選択して頂くことになります。
採用する各種作業専門装置に準ずる
構成要素(仕様)
| パウロ種類 | 容器移動型 |
| 計量/供給装置 | ●ゼロバランサー |
| ●ゼロバランサーコンパクト | |
| ●ダストディパーチャー | |
| ●ミリゼロ計量/供給仕様 | |
| ●ミリフィーダー計量/供給仕様 | |
| 天びん | 各社各種(※装置全体構成より使用可否判断あり) |
| タッチパネル(右より選択) | ●ウィンテック株式会社製 |
| ●シュナイダーエレクトリックホールディングス株式会社製 | |
| ※アルファ製計量/供給装置を複数設置の場合、1台につきタッチパネルも1台設置。 | |
| 制御盤 | ●自立型 |
|
●組み込み型 |
|
| ※大きさ、カラー等ご相談に応じて専用仕様に変更可能 | |
| 供給機用追加可能(オプション)部品 | ●投入シュート |
| ●増設ホッパー ※ゼロバランサー/ダストディパーチャー底面型使用時のみ |
|
| ●投入口アタッチメント | |
| ●ブリッジブレーカー増設ホッパー内用 ※ゼロバランサー/ダストディパーチャー底面型使用時のみ |
|
| ●ブリッジブレーカースクレッパー装着用 | |
| ●粉末抑制用かさ | |
| ●排出ノズル | |
| ●振動機(貯槽部用、排出部用、容器用) | |
| ●除電器(ホッパー付近用、排出口付近用) | |
| ●RFIDタグ+リーダー(供給機種判別用) | |
|
●粉受け |
|
|
●レーザーセンサ(ホッパー内粉面検査用) |
|
| 装置全体用追加可能(オプション)部品 | ●集塵機(ホッパー投入口付近用、排出口付近用、風防内全体用) |
| ●除電器(天びん装着用) | |
| ●RFIDタグ+リーダー(容器判別用) | |
| ●LEDライト | |
| ●シグナルタワー | |
|
●レーザーセンサ(容器等有無感知用、容器等大きさ検査用など) |
|
| 搬送・移送装置(機構)/補助作業装置(機構) |
●直交ロボット(株式会社IAI製) |
|
●水平多関節ロボット(株式会社IAI製) |
|
|
●垂直多関節ロボット(DOBOT社製) |
|
|
●バー、アーム |
|
|
●ターンテーブル |
|
|
●コンベア |
|
|
●コロコン(ローラーコンベア) |
※上記表内の各項目は、それぞれ右側の箇条書き部分より選択して頂くことになります。
販売実績・使用事例
事例集がございますので、以下のボタンより専用サイトでご覧下さい。