| 項目 | 内容 | 図 | 備考 |
| 容器入れ替えロボット | Xスライダーロボット | 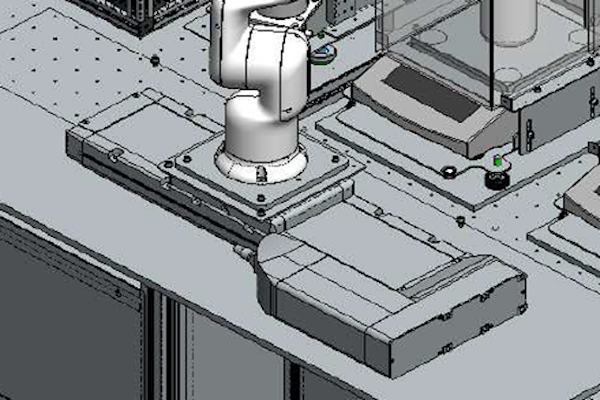 |
協働ロボットを移動させるための1軸ロボット |
| 協働ロボット | 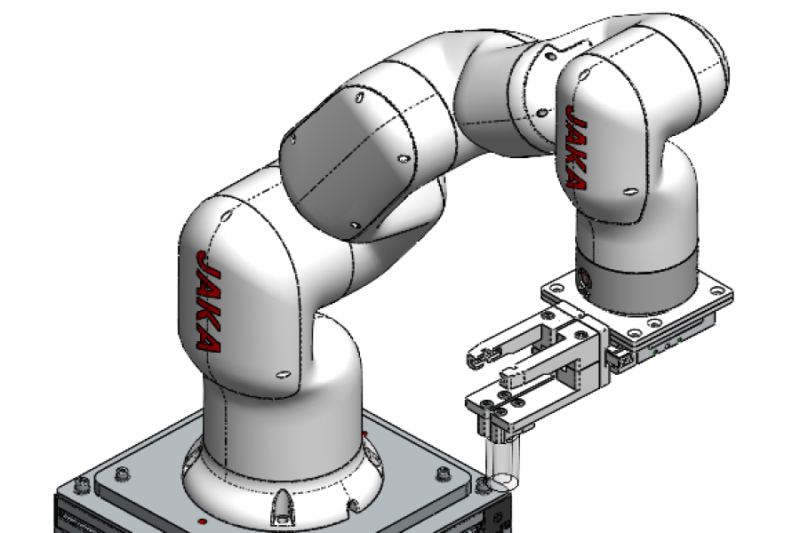 |
||
| 容器ストッカー | 空容器250ccストッカー | 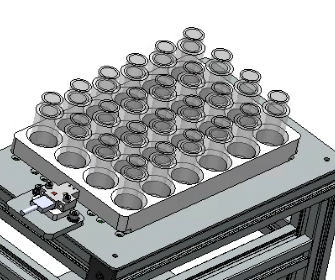 |
計量に使用する空の容器を格納しておく領域 |
| 計量済み容器250ccストッカー | |
計量完了後の充填容器を格納しておく領域 | |
| 共通架台 |
アルミフレーム架台 風防付き |
パウロ装置全体を囲うフレームと風防となるアクリル板を組み合わせた部品 | |
| 風防扉:観音開き式 | 装置全体を安全確保のために囲う部品 | ||
| 電磁ロック |
風防扉に設置されるロック機能をなす部品 |
||
| 昇降可動部カバー | 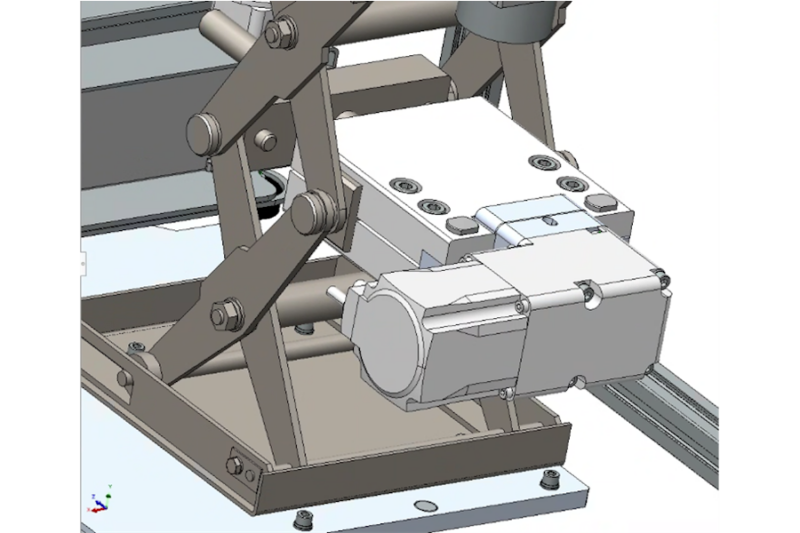 |
手動パンタ架台を昇降させる部品箇所を保護するためのカバー | |
| X軸可動部エリアセンサー | 安全装置の1つ。バーのような部品の間を物が通るとセンサが反応して、稼働を一時停止などすることができる。 協働ロボットを直進移動させるためのスライダー付近に設置するセンサー。 |
||
| ロボット可動部エリアセンサー | 安全装置の1つ。バーのような部品の間を物が通るとセンサが反応して、稼働を一時停止などすることができる。 協働ロボットが作業をする付近に設置するセンサー。 |
||
| 集塵部 | 集塵機 |  |
集塵の動力源になる装置 |
| 集塵経路自動切替ダンパー:3系統 | 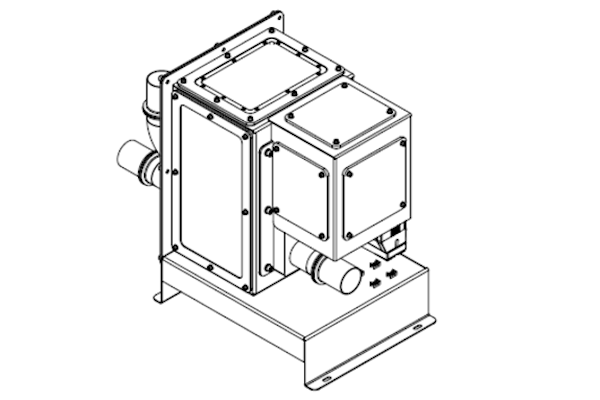 |
1台の集塵機で数か所の吸引をするために必要な装置 | |
| ノズル集塵フード:自動開閉ダンパー付き | 吸引箇所に取り付けるカバーのような部品。効率よく吸引できるように空気の流れと容器の投入口の形状などを考慮して設計。 | ||
| 集塵ダクト資材 | 集塵するためのホース、接続器具、分岐部品などの一式 | ||
| 操作部 | 7インチタッチパネル |  |
●コントロールパネル部に運転、停止、非常停止ボタンを付属したモデル |
| 制御部 | パウロ連携制御 | 協働ロボット、Xスライダーロボット、ゼロバランサー等計量装置、集塵機等の付加機器を連携動作させるための制御システムの構築 | |
| 調整費 | 社内組み立て調整費 | ||
| 確認費 | 出荷前お立ち会い確認費 | ||
| 納入費
|
輸送・荷造り梱包費 |
||
| 現地据え付け・運転確認費 | 作業者の出張・宿泊費を含む | 据え付け作業1日:2人 試運転確認1日:1人 操作説明1日:1人 |
|
|
諸費用 |
取扱説明書 |  |
|
|
|
取扱説明書電子データ | ||
|
オプション費用 |
サポート延長サービス費 | サポート延長サービスの詳細 |
ホームサイト

ホームサイト

事例集

工場見学

ユーザー専用
ホームサイトを表示中
Table of Contents
Add a header to begin generating the table of contents