高精度自動計量配合装置
~微量の粉末同士を計量して配合~
製品の概要と動き
パウロ配合連続型-直交1軸-協働ロボット仕様は、
計量装置と協働ロボットによる
「計量と配合作業を全自動で行う装置」です。
使用者が容器ストッカーに空容器を設置し、運転ボタンを押すだけで、複数種の計量された粉が容器に配合された状態で容器ストッカーに戻ってきます。
◆装置全体が行う作業◆
最大12種類の粉を順に自動計量
+
ロボットの供給機・容器入れ替え作業による自動配合
+
容器ストッカー上のトレーまでの容器搬送
◆人が行う作業◆
配合計量作業内容の設定・供給機と粉末種の紐づけ登録
+
トレーの付け外しと空容器・配合済み容器の入れ替え
+
(容器蓋の開け・締め)
製品の使用効果
マテリアルズインフォマティクスに貢献
データを増量、より高品質なものへ
◆必要な素材に関するデータを効率よく取得し、手間をかけることなく蓄積・保存が可能です。
◆記録項目や解析に必要な形式を統一させておくことで、データそのものの品質の向上も図れます。
サンプル調製・移し替えを自動化
手動で行われているサンプル調製作業や、バイアル等へのサンプルの移し替えができます。
それらの作業にかかる時間と労力の節約に貢献し、データ採集における生産性の向上が図れます。
データの置換・取込が容易
配合計量した内容のデータを、管理したい形式に置換して記録を残すことが可能です。
装置とパソコンを連携させておけば、装置の稼働中であっても記録したい項目(内容)の変更・修正が容易にできます。
材料開発をよりスピーディーに
製品の特長
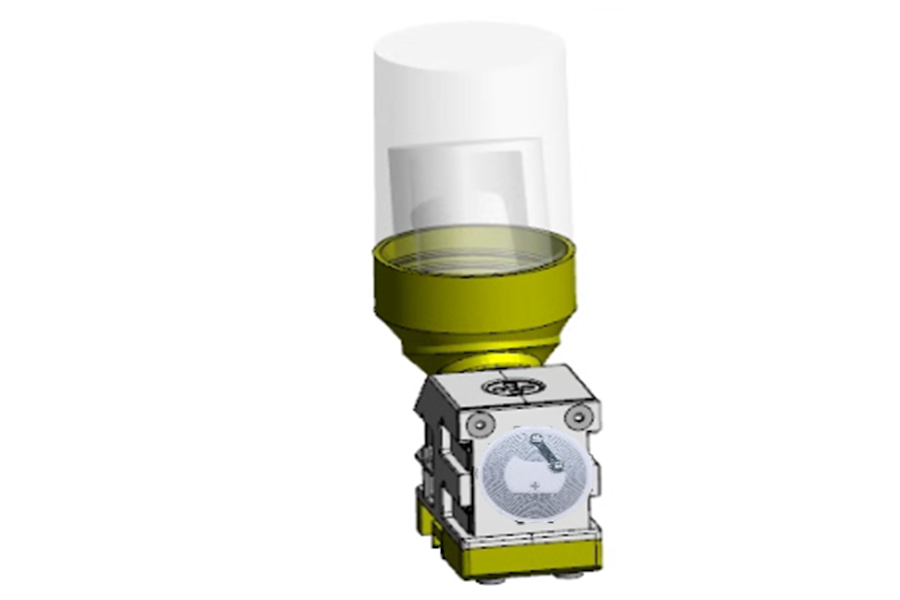
少量多品種に特化
少量多品種の粉を扱うため、コンパクトな供給機と粉末貯槽部をもつ装置になっています。
貯槽部は100cc容器タイプと15cc容器タイプがあり、大きい方の100ccタイプでも150mm×55mm×95mm程度のサイズになります。
コンパクトな供給機部分とストックスペース、場所をあまり必要としない協働ロボットとの組み合わせにより、最小限のスペースで作業ができます。
また、アルファのあらゆる粉末に対応可能な計量装置と、複雑で面倒な作業にも応用の利くロボットを組み合わせることで、少量多品種であっても正確な計量と配合作業が安定して行えます。
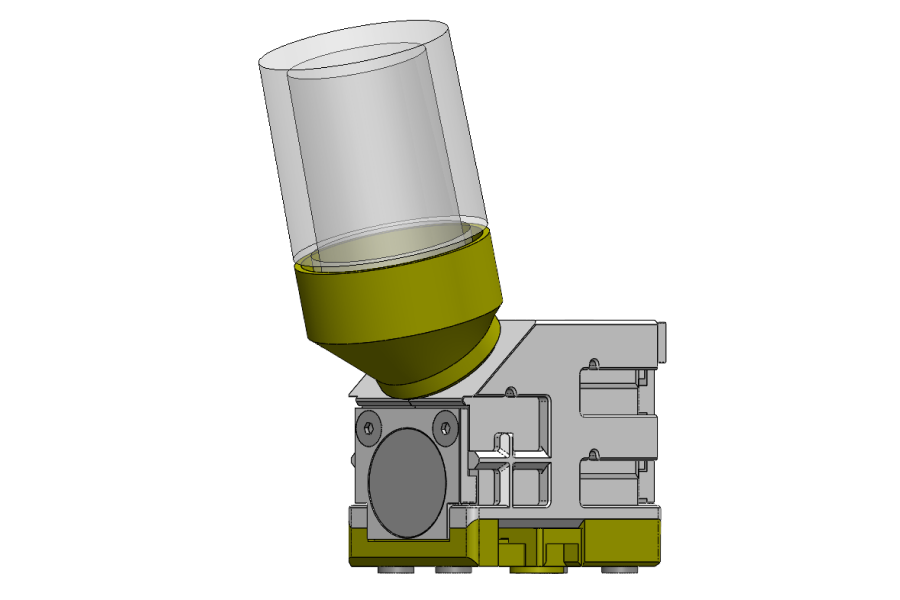
供給機寸法:150mm(H)x55mm(W)x95mm(D)
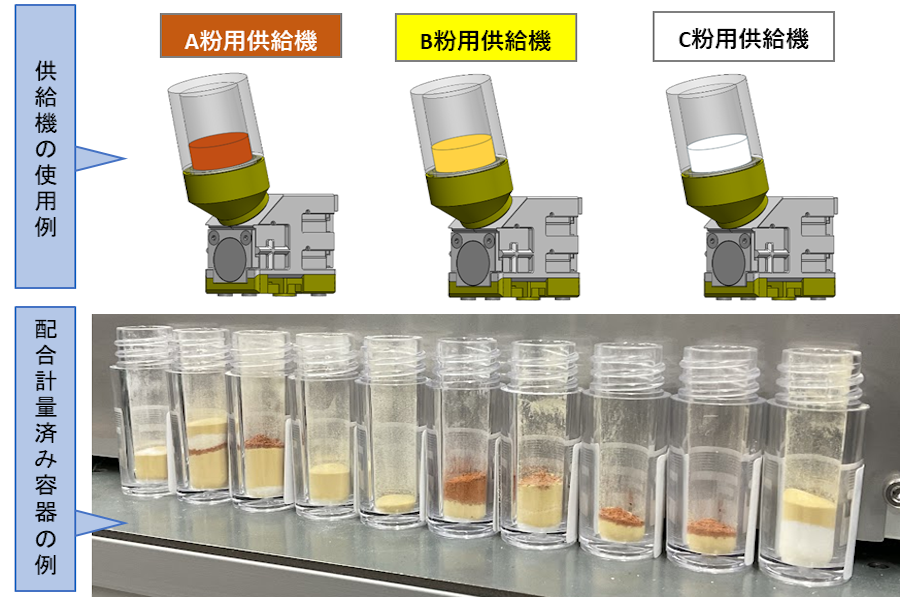
面倒な粉末入れ替え不要
複数種の粉末を配合するときに面倒になる、計量装置(供給機)への粉末の入れ替えが不要です。
粉末1種類につき、供給機が1台用意されているため、供給機を入れ替えるだけで計量と配合が可能です。
供給機の入れ替えはロボットが行います。
無駄なく安全な作業
全自動作業によって、人が携わることが最小限になり、毒性・危険性のある粉も安全に取り扱うことができます。
グローブボックス内など、一定の条件下での作業も可能です。
全自動による作業の正確性向上により、人による作業と比べて配合計量に失敗して無駄になる粉がでることもありません。
サンプラに適応した容器が使用可能

バイアルやアンプルのような小径小型容器も扱えます。
(密封方法や蓋の開閉などの動作については要相談になります)
細長かったり、自立しなかったりなど、人が粉末を投入するのに苦労するような容器へも粉を直接投入することができます。
扱う容器に合わせてロボットのアームや爪部分、容器の置台等をオリジナル設計・製作することで対応が可能です。
自動でシームレスなデータ移行と管理
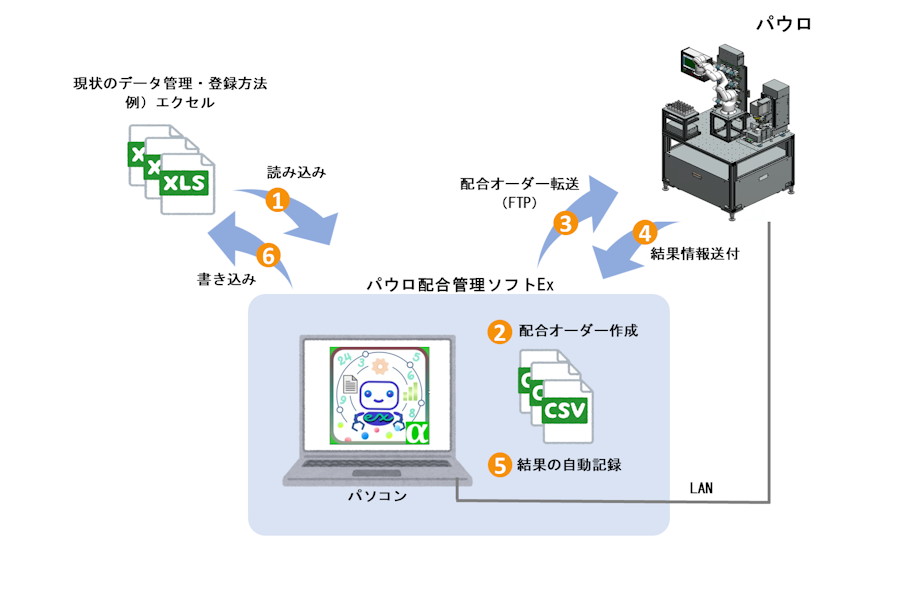
▲データのやりとりイメージ
計量と配合の記録を自動で行うことはもちろん、記録したい内容や項目を使用者向けに設定することも可能です。
今お使いの、粉の配合率や重量等の情報の管理形式に合わせることのできるソフトを使用することで、現状の管理・登録方法を維持したまま、装置を使用できます。
また、パソコンと装置を接続させた状態にしておけば、その場の作業内容の変更指示も随時可能です。
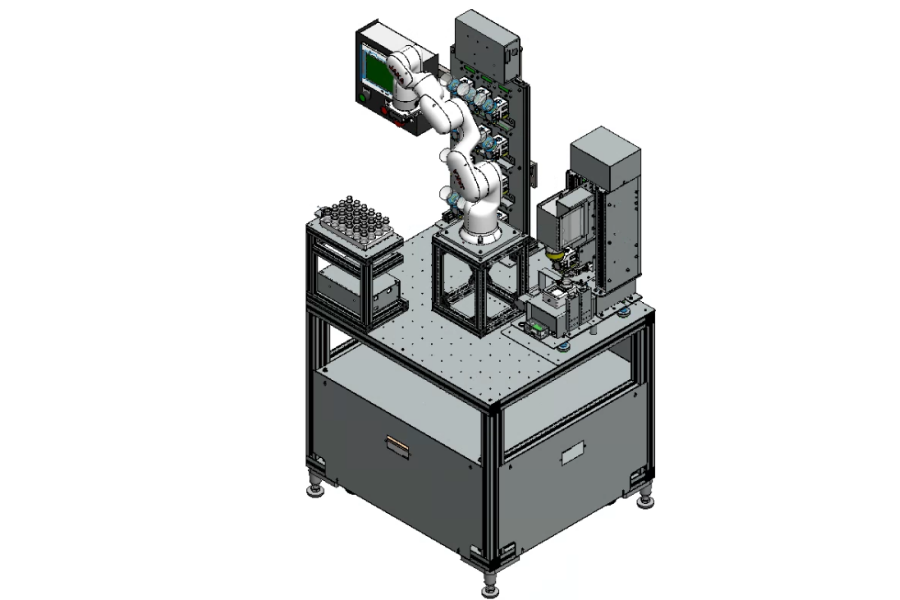
製品構成
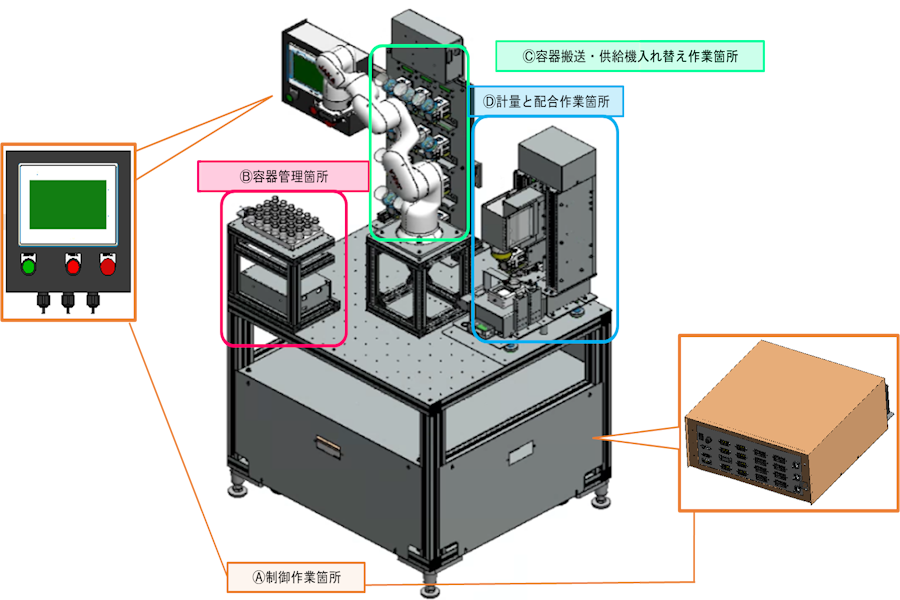
装置寸法:W760mm x D680mm x H1440mm
※80mmピッチで増幅可能な装置です。上記のサイズより小さくすることはできません。
Ⓐ制御作業箇所
主にタッチパネルと制御盤で装置全体に指令を出して動かします。
タッチパネルで動きの設定や作業の記録などをし、パソコンやその他のデバイスにデータを転送できます。
専用ソフトを使用することで、装置とパソコンを常時接続し、最新データの結果によって作業内容を即座に変更することも可能です。
Ⓑ容器管理箇所
作業に使用する容器を格納するための容器ストッカーがあります。
容器ストッカーには容器トレーが乗っています。容器トレー状には最大24個の容器を格納しておくことができます。
容器トレーにのっている空容器をロボットが計量箇所まで搬送します。
計量と配合が完了した充填容器をロボットが容器ストッカーまで搬送し、トレー上に乗せます。
Ⓒ容器搬送・供給機入れ替え作業箇所
供給機を格納するための供給機ストッカーがあります。
供給機ストッカーは6台まで供給機を設置しておくことができます。
必要な粉が入った供給機をロボットが順にストッカーから取り出し、計量装置に取り付けます。
ロボットが供給機と容器の搬送作業をします。
Ⓓ計量と配合作業箇所
ゼロバランサーコンパクト(計量装置)が超微量であっても高精度で正確な計量を行います。
粉末の性状に合わせた機能と付加機器の設定により、効率のよい最適な作業が行えます。
製品の動作説明
❶
空容器の搬送と設置
容器ストッカーにあるトレーの上に収められた空容器をロボットがグリッパー(容器側)を使って取り出し、天びんの手前にある容器台まで搬送します。
天びん手前容器台に置かれた容器は、容器搬送スライダーによって計量位置である天びん上に乗せられます。
その後、計量装置上部に設置してある風防が下げられます。
❷
供給機の搬送と設置
ロボットは供給機ストッカーに設置されている複数の供給機の中から、使用したい粉末の入った供給機を取り出します。
グリッパー(供給機側)で、供給機を挟み込み、供給機ストッカーの突起部品からスライドさせて引き取ります。取り出した供給機を計量装置まで搬送し、計量装置に取り付けられている同じ金属の突起部品に供給機の溝に沿わせるようにスライドしてはめ込み、取り付けます。
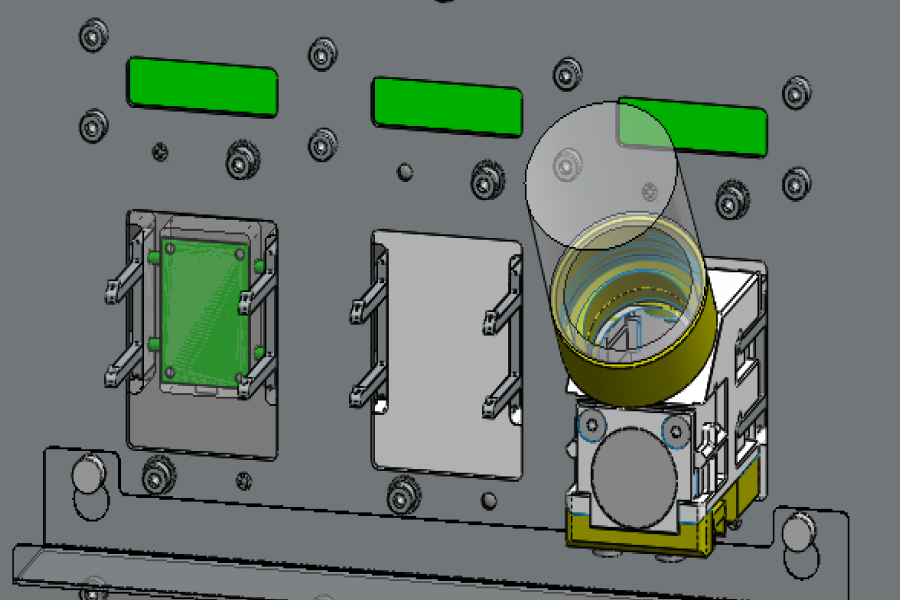
❸
計量と配合
ロボットによって、必要な供給機が計量装置に設置されると、供給機が下降し、粉末排出口が容器の投入口付近まで近づけられます。
容器、風防、供給機が指定の位置にそろうと、計量が開始されます。アルファ独自の分散供給で、正確な安定した計量をします。
この計量作業を複数種の粉末を対象に繰り返し行うことで、自動で配合された状態にできます。
❹
供給機の入れ替え (搬送と設置)
計量が完了するごとに、ロボットがそのとき使用した供給機を計量装置から取り外し、次の計量に使用する粉末の入った供給機に付け替えます。
計量装置に設置されている供給機をグリッパー(供給機側)を使用して取り外し、供給機ストッカーまで搬送します。搬送してきた供給機を適切なストック位置に取り付け、次に使用する供給機を取りに行きます。
再び同じグリッパーハンド部分を使用して供給機をストッカーから取り出し、計量装置まで搬送して取り付けます。
❺
❸と❹の作業の繰り返しと記録
ソフトで登録・管理された順に装置は粉末の計量と配合作業を繰り返します。
作業結果は随時自動で記録され、パソコンに接続されていれば、ソフトにある情報を規定の管理方法(エクセルなど)に変換と書き込みが可能です。
❻
充填容器の搬送と格納
1つの容器に対する計量と配合の作業が完了すると、まず風防が上がります。
次に、容器搬送スライダーによって充填容器が天びん手前容器台に置かれます。
その後、ロボットが充填容器を回収し、容器ストッカーまで搬送して、格納します。
作業ごとの様子
空容器・配合済み容器の
取得・設置・搬送
装置は、ロボットのグリッパーハンド部分の容器側を使用して、容器を容器ストッカーから取り出したり、戻し入れたりします。
ロボットが容器の容器ストッカーから天びん手前容器台までの往復搬送作業も行います。
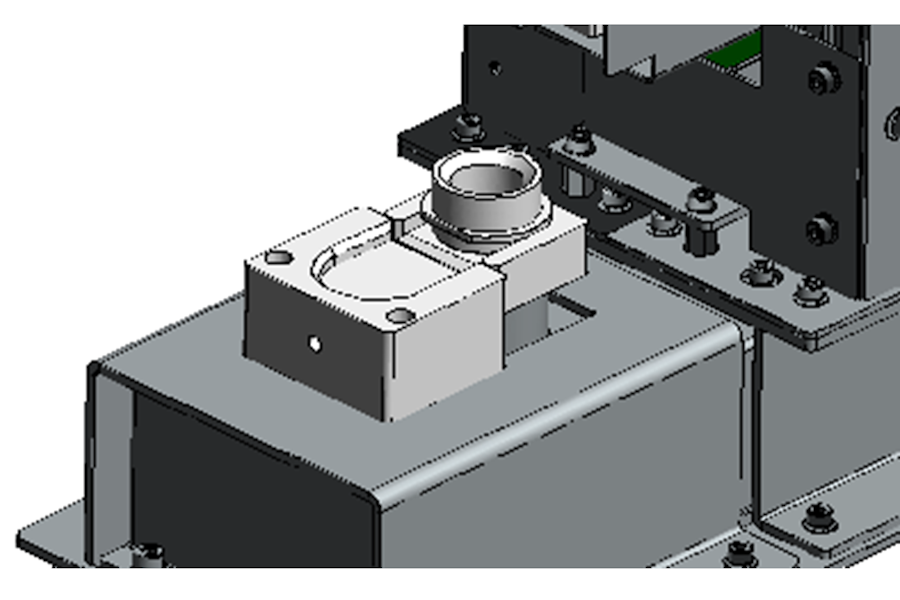
供給機の入れ替え
(取得・設置・搬送)
装置は、ロボットのグリッパーハンド部分の供給機側を使用して、供給機ストッカーにある供給機を取り出したり、戻し入れたりします。ロボットが供給機の供給機ストッカーから計量装置までの往復搬送作業も行います。
ストッカー側に供給機を引っ掛けるための金属の突起部品が取り付けられています。ロボットがその突起部品に供給機の側面にある溝部分を通し掛けることによって、供給機を設置します。
ロボットは供給機をストッカーから取り出す際には、グリッパー(供給機側)で供給機を挟み込んで少し持ち上げ、水平にスライドさせるようにしてストッカーの突起部品から抜き取ります。
ロボットは同じ動きで、計量装置にも供給機を取り付けたり、取り外したりします。
計量と配合
(ゼロバランサーコンパクト動作)
計量装置(ゼロバランサーコンパクト)が、設置された容器一つに、粉末を一種類ずつ順番に計量していくことで、容器内に複数種の粉末を投入することができます。
風と静電気の影響を防ぐための風防や静電除去器(除電器)の稼働切替や調整も自動で行います。
ソフトから提供されたレシピにそって、計量と配合を行います。
作業の状況や結果等は、タッチパネル上のモニタ画面に反映されます。
特長的な設備・機能
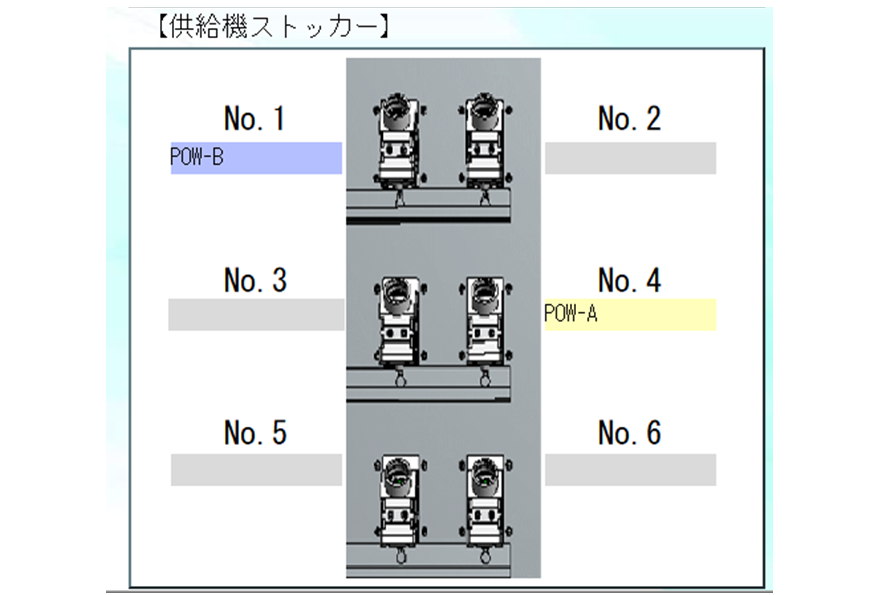
供給機ストッカー

装置壁面に複数の供給機を設置した供給機ストッカーがあります。
供給機を引っ掛けて収納するタイプのストッカーで、最大12個の供給機がストックできます。
壁面に金属の突起部品が取り付けられています。ここに、供給機が引っ掛けられるように設置されます。
供給機の設置面にはRFIDリーダー・ライターが取り付けられており、粉末の種類とそれが貯蔵されている供給機の設置箇所が明確になっています。
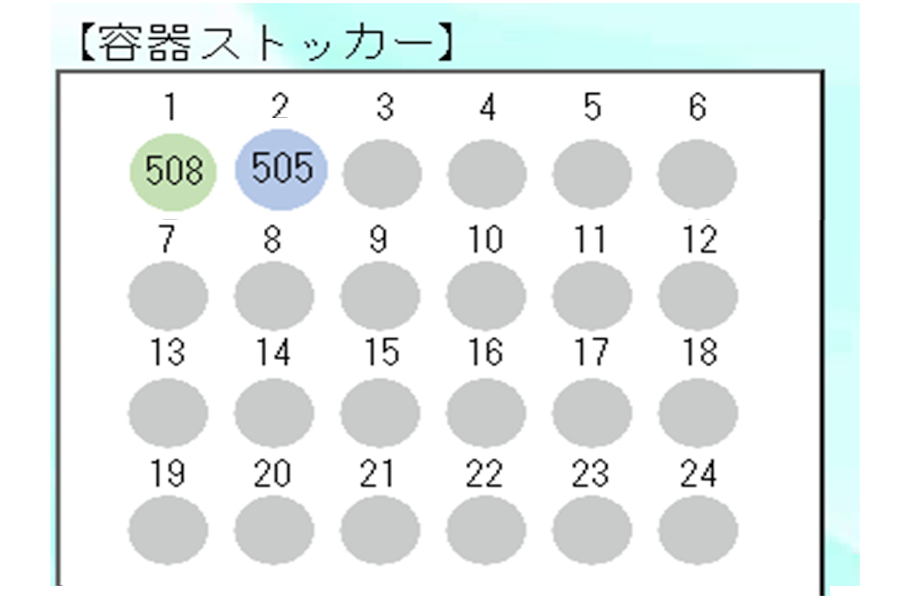
作業結果一覧表示
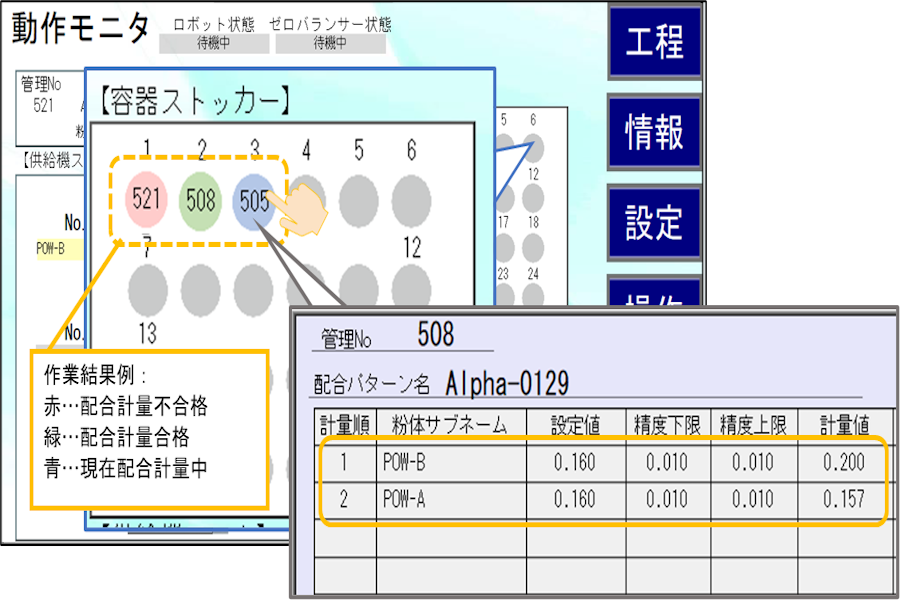
タッチパネルのモニタ画面で、容器トレーに乗っている各容器の作業(配合計量)結果が一目で確認できます。
作業結果はモニタ上の色で判別します。
「配合計量が問題なく完了した容器」なのか、「途中で計量が不合格になった容器」なのかといった状態を色で知らせます。
タッチパネルに表示されているトレー上の容器箇所をタッチすると、配合された粉末の種類(サブネーム)と各粉末の設定重量値・精度上限/下限値・実際に計量した重量値の一覧が表示されます。
協働ロボット
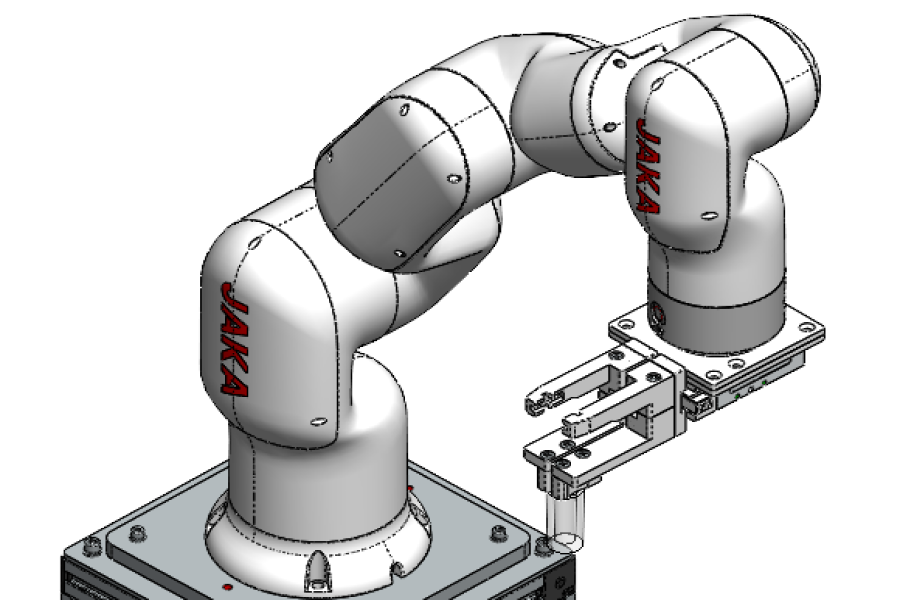
計量に使用する粉末が入った供給機を入れ替えたり、容器を天びん手前容器台まで搬送したりする動きを協働ロボットが行います。
本来計量が完了するたびに行わなければいけない前記のような動作を、協働ロボットが請け負うことで、人の作業時間が大幅に減ります。
そのため、研究所・開発所等での使用時には、研究者の計量配合の作業時間が削減され、研究そのものに当てる時間を増やすことができます。
RFIDタグとRFIDリーダー・ライター
RFIDタグ
各供給機と容器には、RFIDタグが付けられています。
RFIDタグには情報を書き込むことができるため、供給機や容器と、そこに入っている粉の種類の紐づけが容易にできます。
また、充填容器の中の粉の種類や配合分量などの情報をタグに書き込んで管理できます。
情報の入ったタグをRFIDリーダー(ライター)にかざすことで、タグの付いた供給機や容器の中身をすぐに確認することができます。
RFIDリーダー・ライター
設置箇所❶供給機ストッカー
供給機ストッカーの各供給機取り付け位置にはRFIDリーダー・ライターが付けられています。それらは設置された供給機に添付されたRFIDタグの情報内容を読み取ります。
ストッカーに添付されているリーダーが各供給機に投入されている粉末の種類を読み取り、どこのストッカー位置に何の粉末が入った供給機があるのかを装置に知らせます。その情報を基に、ロボットは配合に必要な粉末が入った供給機を選んで取り出します。
設置箇所❷パソコン付近

RFIDリーダー・ライターは、供給機や容器に貯槽されている粉末の種類を読み取るため、パソコンへの読み込み用にも設置されています。使用者がどこに何の粉末を入れたか忘れてしまった場合などでも、供給機や容器をRFIDリーダー・ライターに近づければ、その中身の情報を容易に確認できます。
また、このリーダー・ライターで供給機や容器に張り付ける予定のタグへの情報の書き込みも行います。
設置箇所❸天びん手前容器台
天びん手前容器台には、空容器と充填容器が計量配合前と計量配合後に置かれます。
ここでは、計量配合前の空容器へは情報の初期化を行います。これから計量する内容を書き込むために、既存の情報を消去しておきます。
そして、計量配合が終わった後の充填容器が置かれたときには、そのときの作業結果が容器に書き込まれます。
装置全体作業の状態・状況が分かるモニタ機能
タッチパネル画面上
タッチパネルのモニタ画面では、現在動作中の箇所(ロボット箇所、又は計量装置箇所)、容器・供給機の状態、計量作業の状況が確認できます。
それぞれランプの点灯・非点灯、ランプの色分け、表示される文言などによって、状態や状況がモニタを見ることで分かるようになっています。
さらに、容器を示す箇所を押すことで、その容器の配合計量作業の内容と結果がポップアップ画面に表示されます。
(上記「作業結果一覧表示」で紹介)
ランプ色と内容
供給機ストッカー

容器ストッカー

パソコン画面上(配合用ソフト使用時)
パソコン上のモニタ画面では、配合オーダーの一覧と進行状況、容器トレー上の各容器の作業状況などが確認できます。
それぞれ一覧内の色分け、表示される文言などによって、状態や状況がモニタを見ることで分かるようになっています。
現在作業に関係している内容の欄が「青」、既に正常に完了しているものは「緑」で示されています。
仕様一覧
計量装置
| 装置種類 | ゼロバランサーコンパクト |
| 供給機種類 | アルファフィーダーゼロバランサーコンパクト用 |
| 標準装備品 | 投入ホッパー |
| RFIDタグ | |
| RFIDリーダー・ライター | |
| 自動開閉風防 | |
| 架台 | |
| 振動機 | |
| 自動開閉粉受け | |
| 天びん |
メトラー・トレド社製、目量0.1mg/最大ひょう量220g 組み込み天びん |
| 静電気除去器 | 直流式無風除電タイプ |
パウロ装置
| 装置種類 | 容器・供給機入れ替え型ー協働ロボット仕様ー |
| 移送ロボット | 協働型ロボット(DOBOT Magician E6) ※DOBOTの使用は今回のみ。今後はJAKA社製を使用。 |
| 搬送ロボット | 直交1軸ロボット 50mmストローク |
| 容器ストッカー |
230㎜×150㎜ 対応容器:容量 5mL 、収納最大個数24個、 サイズ50mm×φ20mm(内径φ12㎜) |
| 供給機ストッカー | 280㎜×470㎜ 格納可能供給機台数:6台 |
| 制御盤 | 装置本体架台内収納型W450×D500×H160㎜(突起物を除く) |
| タッチパネル |
カラー7インチ、アーム付き(weintek社製) |
| 制御ソフト | パウロブレンドマネージャーEX ※パウロ連続配合型の場合必須 |
| 標準装備品 | 静電気除去器(除電器) |
| 架台 | 特注架台W760xD680xH690mm |



